image_cluster_indices_decomposer.py¶
What is this?¶
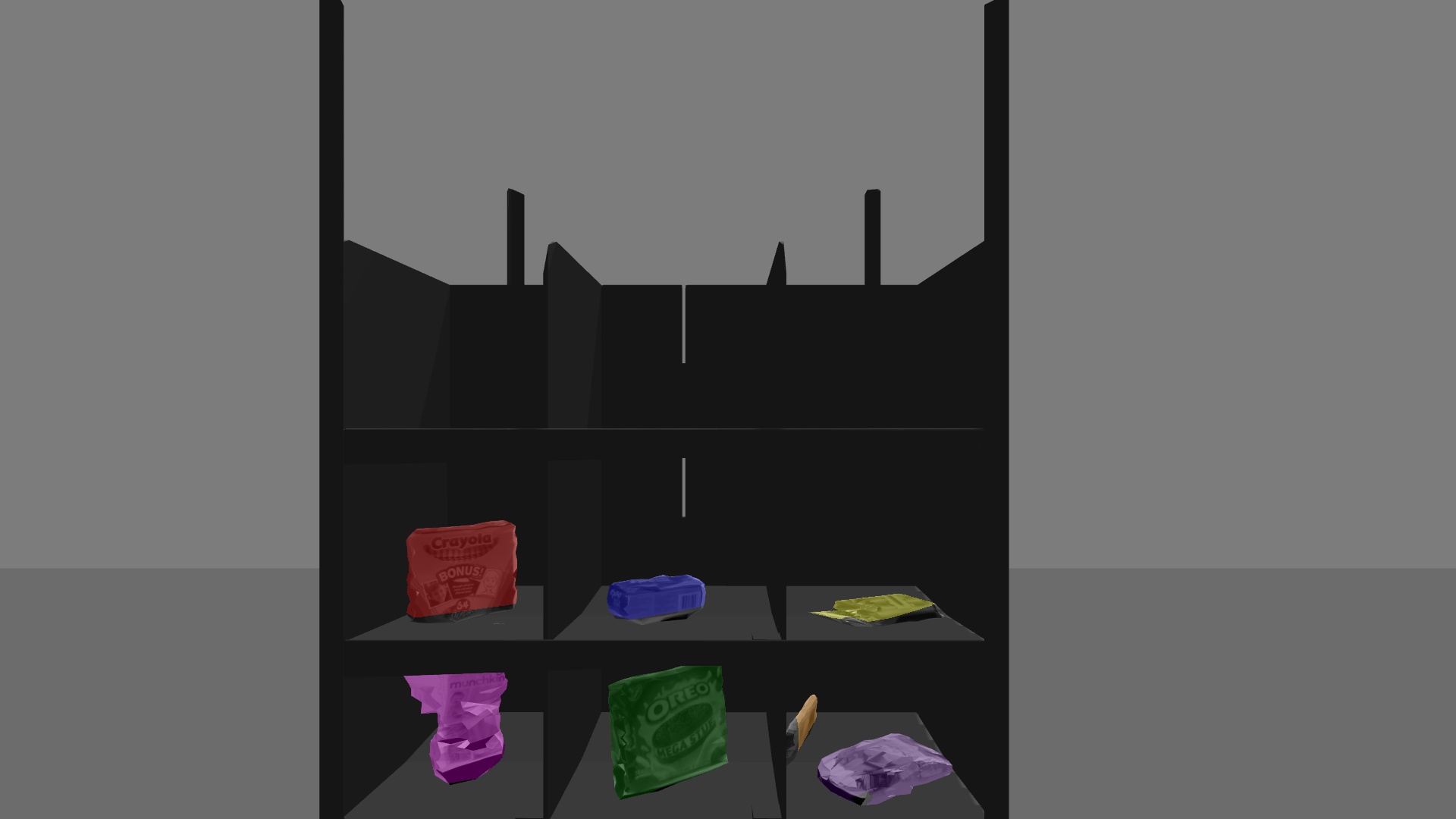
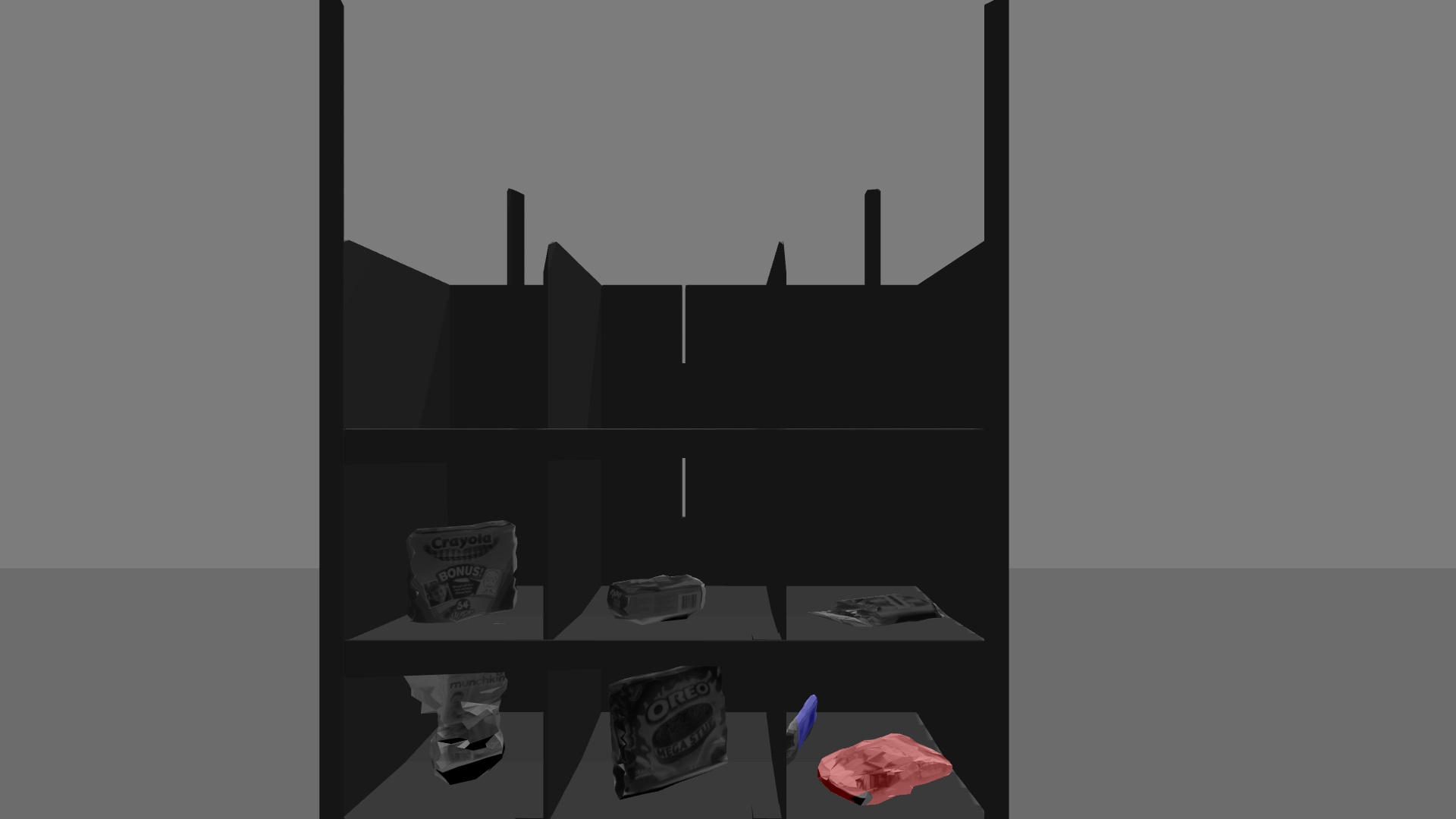
Publish an image topic to which cluster of image indices is colorized.
Subscribing Topic¶
~input(sensor_msgs/Image)Raw image.
~input/cluster_indices(jsk_recognition_msgs/ClusterPointIndices)Cluster of indices to visualize.
Publishing Topic¶
~output(sensor_msgs/Image)Visualized image with colorized region which is assigned with the indices.
Parameters¶
~approximate_sync(Bool, default:False)Whether to use approximate for input topics.
~queue_size(Int, default:100)How many messages you allow about the subscriber to keep in the queue. This should be big when there is much difference about delay between two topics.
~slop(Float, default:0.1)How many seconds you allow about the difference of timestamp when you specify
~approximate_sync.
Sample¶
rosrun jsk_perception install_test_data.py
roslaunch sample_image_cluster_indices_decomposer.launch