classification_node.py¶
The ROS node for Classification with CLIP.
System Configuration¶
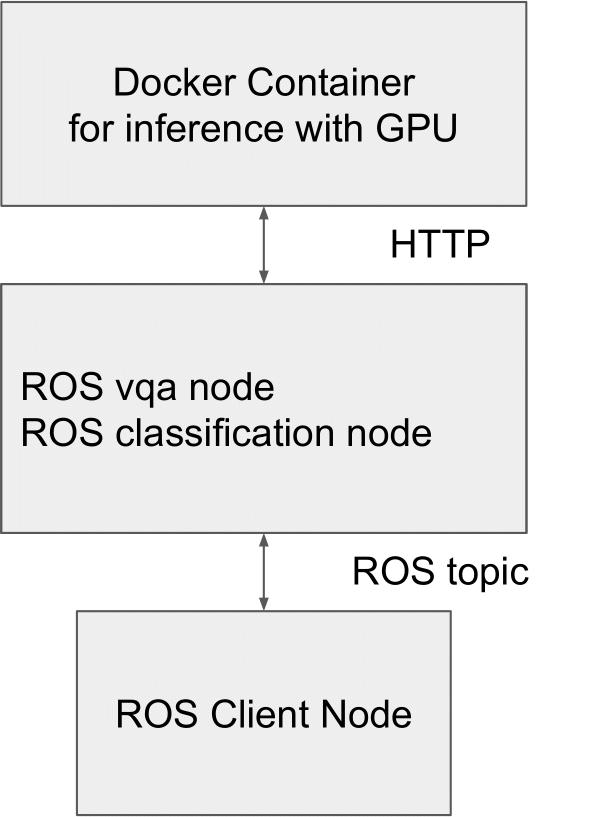
This node requires to work with the Docker Container for inference. Please build the container at first following Setup instruction.
Prerequisite¶
This node requires NVIDIA GPU and more than 4GB GRAM to work properly. You have to install nvidia-container-toolkit for using GPU with docker. Please follow official instruction.
Build the docker image¶
You have to build the docker image of OFA
roscd jsk_perception/docker
make
Subscribing topic¶
~image(sensor_msgs/Image)Input image
Publishing topic¶
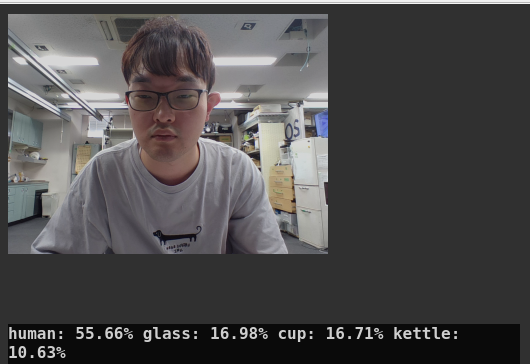
~result(jsk_recognition_msgs/ClassificationResult)Classification result
~result/image(sensor_msgs/Image)Images used for inference
~visualize(std_msgs/String)Classification result to visualize
Action topic¶
~inference_server/goal(jsk_recognition_msgs/ClassificationTaskActionGoal)Classification request with custom categories and image
~inference_server/result(jsk_recognition_msgs/ClassificationTaskActionResult)Clasification result of
~inference_server/goal
Parameters¶
~host(String, default:localhost)The host name or IP of inference container
~port(Integer, default:8080)The HTTP port of inference container
Dynamic Reconfigure Parameters¶
~queries(string, default:human;kettle;cup;glass)Default categories used for subscribing image topic.
Run inference container on another host or another terminal¶
In the remote GPU machine,
cd jsk_recognition/jsk_perception/docker
./run_jsk_vil_api clip --port (Your vacant port)
In the ROS machine,
roslaunch jsk_perception classification.launch port:=(Your inference container port) host:=(Your inference container host) CLASSIFICATION_INPUT_IMAGE:=(Your image topic name) gui:=true
Run both inference container and ros node in single host¶
roslaunch jsk_perception classification.launch run_api:=true CLASSIFICATION_INPUT_IMAGE:=(Your image topic name) gui:=true