sliding_window_object_detector_trainer_node¶
What is this?¶
Node to train jsk_perception/SlidingWindowObjectDetector using binary support vector machine.
The object is assigned a label of +1 and -1 otherwise. The SVM used is from the OpenCV Library with default set to RBF Kernel and 10-Fold Cross Validations.
Parameters¶
~dataset_path(string, required)Folder name where
~object_dataset_filenameand~nonobject_dataset_filenameresides.It should end with
/.~object_dataset_filename(string, required)Rosbag file name of the object (positive) training set.
The bag file must contain
~object_dataset_topictopic.~object_dataset_topic(string, default:/dataset/roi)Topic name of
sensor_msgs/Imagewhich is a set of positive training examples.~nonobject_dataset_filename(string, required)Rosbag file name of the non-object (negative) training set.
The bag file must contain
~nonobject_dataset_topictopic.~nonobject_dataset_topic(string, default:/dataset/background/roi)Topic name of
sensor_msgs/Imagewhich is a set of negative training examples.~classifier_name(string, required)Path to trained SVM classifier output file.
.xmlor.yamlformat is supported.~manifest_filename(string, default:sliding_window_trainer_manifest.xml)Path to manifest file which contains parameters of the trainer such as trainer window size, save directory, etc.
.xmlor.yamlformat is supported.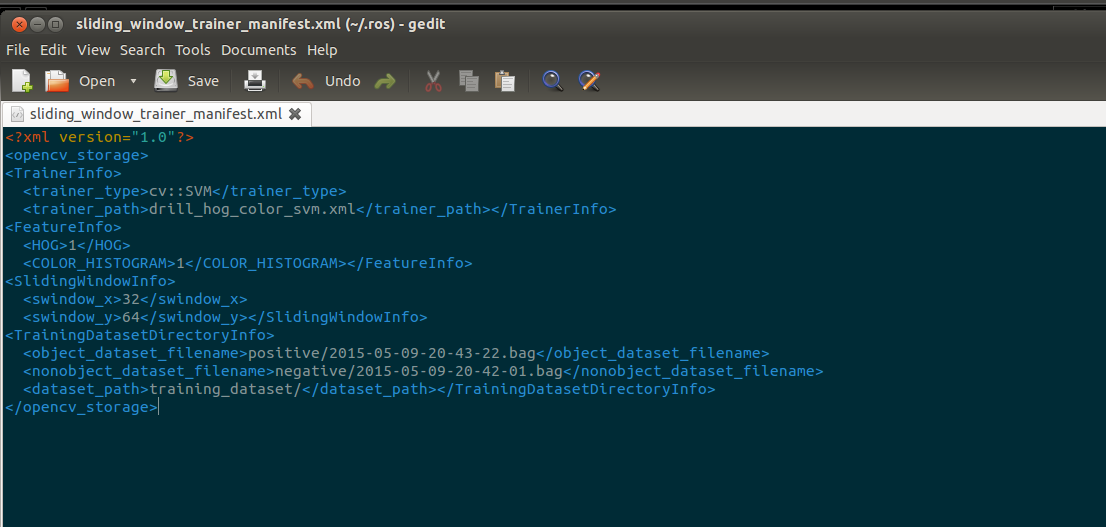
~swindow_x(int, required)~swindow_y(int, required)Images in training dataset are resized to this size (width, height) before training SVM.
Sample¶
roslaunch jsk_perception sample_sliding_window_object_detector_trainer.launch
and wait a few minutes until “Trained Successfully” message appears.