image_publisher.py¶
Publish image from loaded file.
Publishing Topics¶
~output(sensor_msgs/Image)~output/compressed(sensor_msgs/CompressedImage)Compressed Image.
~output/compressedDepth(sensor_msgs/CompressedImage)Compressed Depth Image. This is valid when encoding is
32FC1.~output/camera_info(sensor_msgs/CameraInfo)
Parameters¶
~file_name(str default:image.png)full path to the file to be loaded
~publish_info(bool default:True)publish
~output/camera_infoif true~encoding(str default:bgr8)~frame_id(str default:camera)~rate(Float default:1.0)~fovx(Float default:None)~fovy(Float default:None)If
~publish_infoisTrueand~fovx[degree] and~fovy[degree] are specified, calculate camera intrinsic parameter and publish it as a values of~output/camera_info.
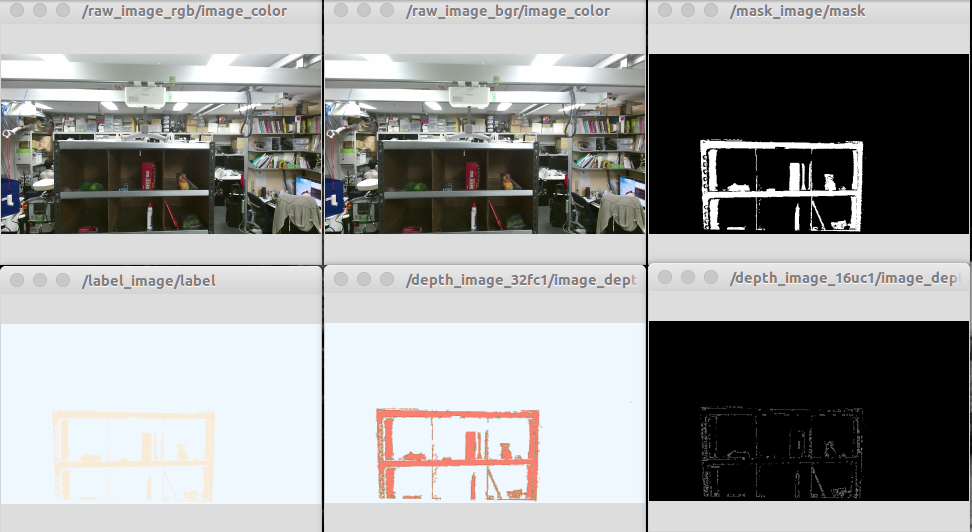
Sample¶
roslaunch jsk_perception sample_image_publisher.launch