ProjectImagePoint¶
Convert image local coordinates (represented as geomery_msgs/PointStamped) into 3-D point.
Z value of the point is specified via dyanmci_reconfigure API.
Subscribing Topic¶
~input(geometry_msgs/PointStamped)Input point in image local coordinates.
~input/camera_info(sensor_msgs/CameraInfo)Camera parameter of the original image.
Publishing Topic¶
~output(geometry_msgs/PointStamped)Output point and the value is scaled to satisfy specified z value.
~output/ray(geometry_msgs/Vector3Stamped)3-D ray vector of the point of image local coordinates.
Parameters¶
~z(Double, default:2.0)Z value of projected point.
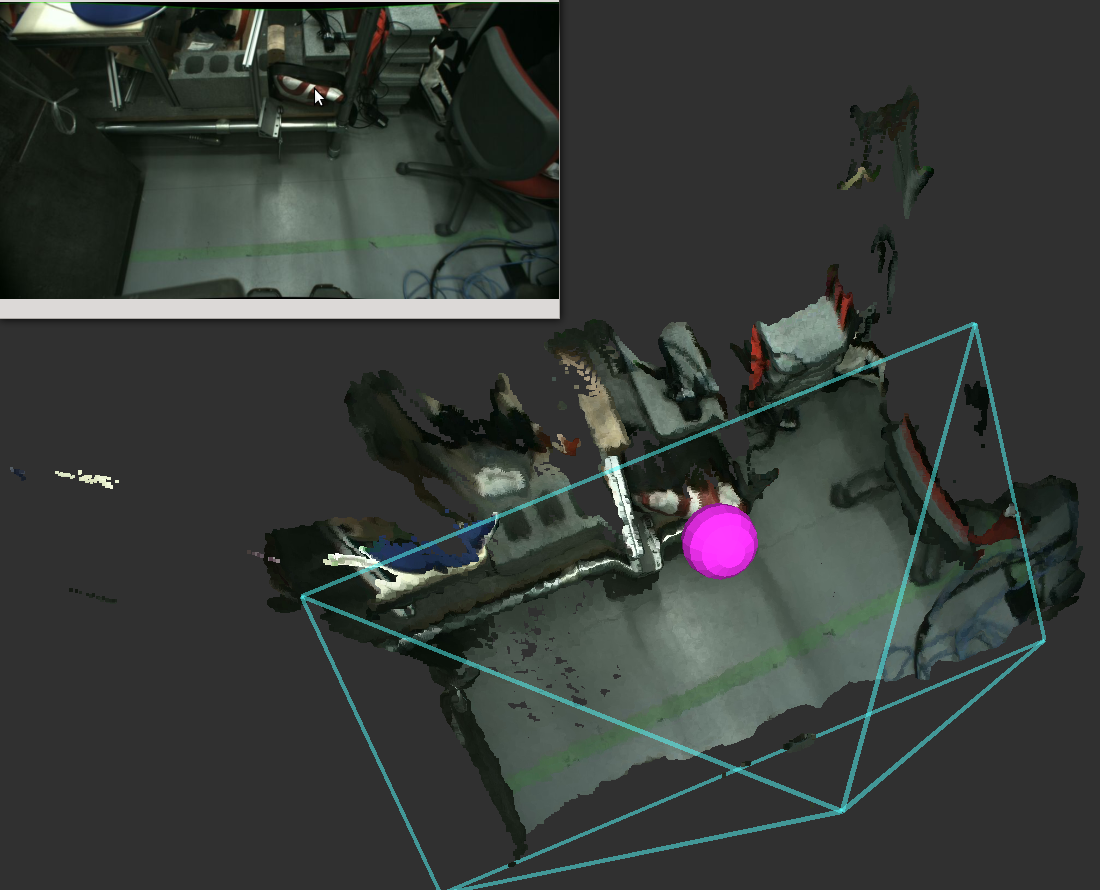
Sample¶
roslaunch jsk_perception sample_project_image_point.launch