PlaneRejector¶
Subscribing Topic¶
~input_polygons(jsk_recognition_msgs/PolygonArray)Input plane polygons.
~input_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Input normal coefficients of planes.
~input_inliers(jsk_recognition_msgs/ClusterPointIndices)Input cluster point indices.
This topic is not used for filtering, and only filtered plane indices will be published.
Subscribed only when
~use_inliersis set to true.
Publishing Topic¶
~output_polygons(jsk_recognition_msgs/PolygonArray)Filtered plane polygons.
~output_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Filtered normal coefficients of planes.
~output_inliers(jsk_recognition_msgs/ClusterPointIndices)Filtered cluster point indices.
Published only when
~use_inliersis set to true.
Parameter¶
~use_inliers(Bool, default:False)Whether to subscribe
~input_inliers.~allow_flip(Bool, default:False)Allow flipping before filtering.
~processing_frame_id(String, required)Frame ID of
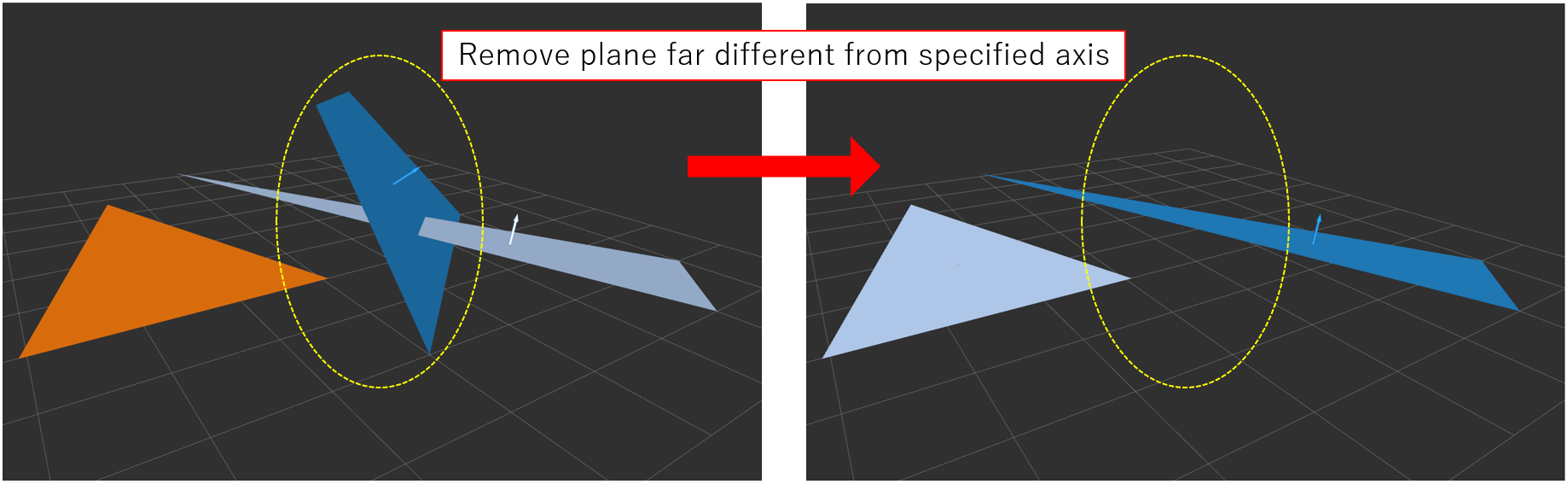
~reference_axis.~reference_axis(List of Float, required)Axis for filtering plane.
It must be composed of 3 float numbers.
Planes whose normal coefficients are different from this parameter will be removed.
~angle(Float, default:0.0)Target angle difference between plane axis and reference axis in radians.
This parameter can be changed by
dynamic_reconfigure.~angle_thr(Float, default:10.0 / 180.0 * pi)Threshold of allowed angular difference in radians.
This parameter can be changed by
dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros_utils sample_plane_rejector.launch