NormalFlipToFrame¶
Flip normal direction towards specified frame.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input pointcloud. It should have normal fields.
Publishing Topics¶
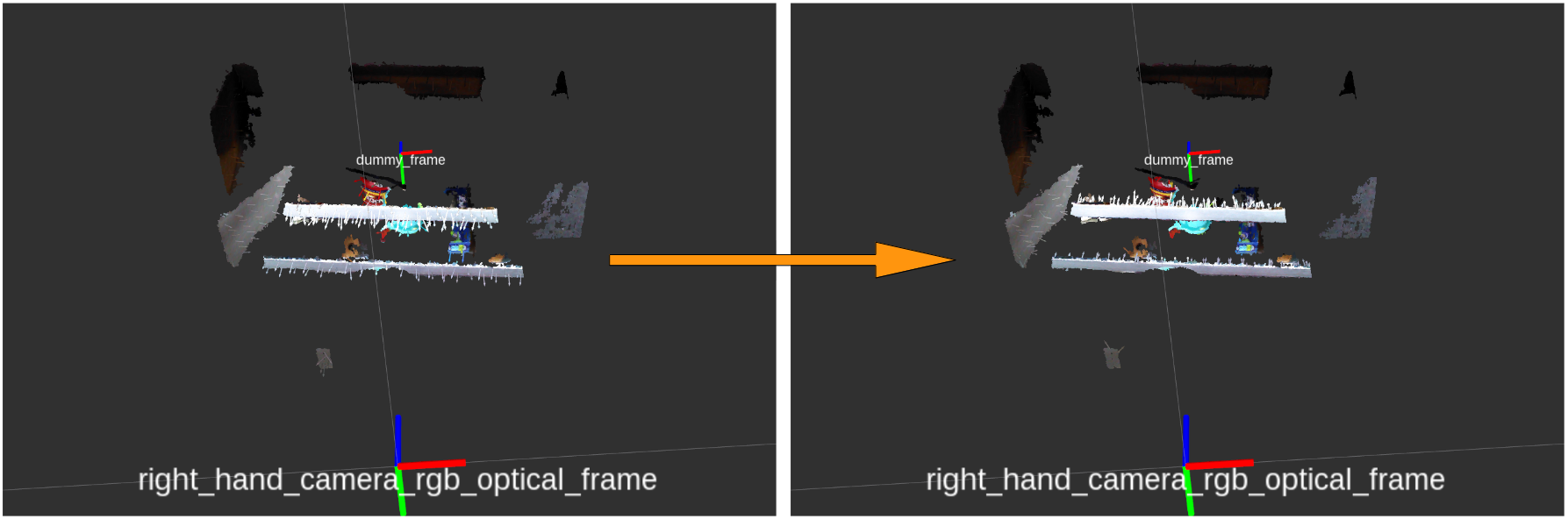
~output(sensor_msgs/PointCloud2)Output pointcloud whose normal vector orients toward specified frame by
~frame_id.
Parameters¶
~frame_id(String, required)Frame ID which is to be oriented by normal vectors.
~strict_tf(Bool, default:false)Do not take into account timestamp if this parameter is false.
Sample¶
roslaunch jsk_pcl_ros_utils sample_normal_flip_to_frame.launch