PlanarPointCloudSimulator¶
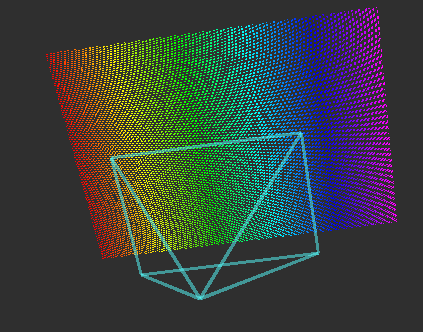
Simulate a pointcloud which is acquired by cameras such as stereo camera and kinect. Sensor model is pinhole camera model.
Subscribing Topics¶
~input(sensor_msgs/CameraInfo)Camera info to simulate pointcloud.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Simulated planar pointcloud.
Parameters¶
~distance(Double, default:1.0)Distance to pointcloud from origin along z-axis.
Sample¶
roslaunch jsk_pcl_ros_utils sample_planar_pointcloud_simulator.launch