cloud_on_plane_info.py¶
What Is This¶
Subscribe bool value representing whether object is on the plane or not, and publish a text.
Subscribing Topic¶
~input(jsk_recognition_msgs/BoolStamped)Boolean value.
Publishing Topic¶
~text(jsk_rviz_plugins/OverlayText)Output text.
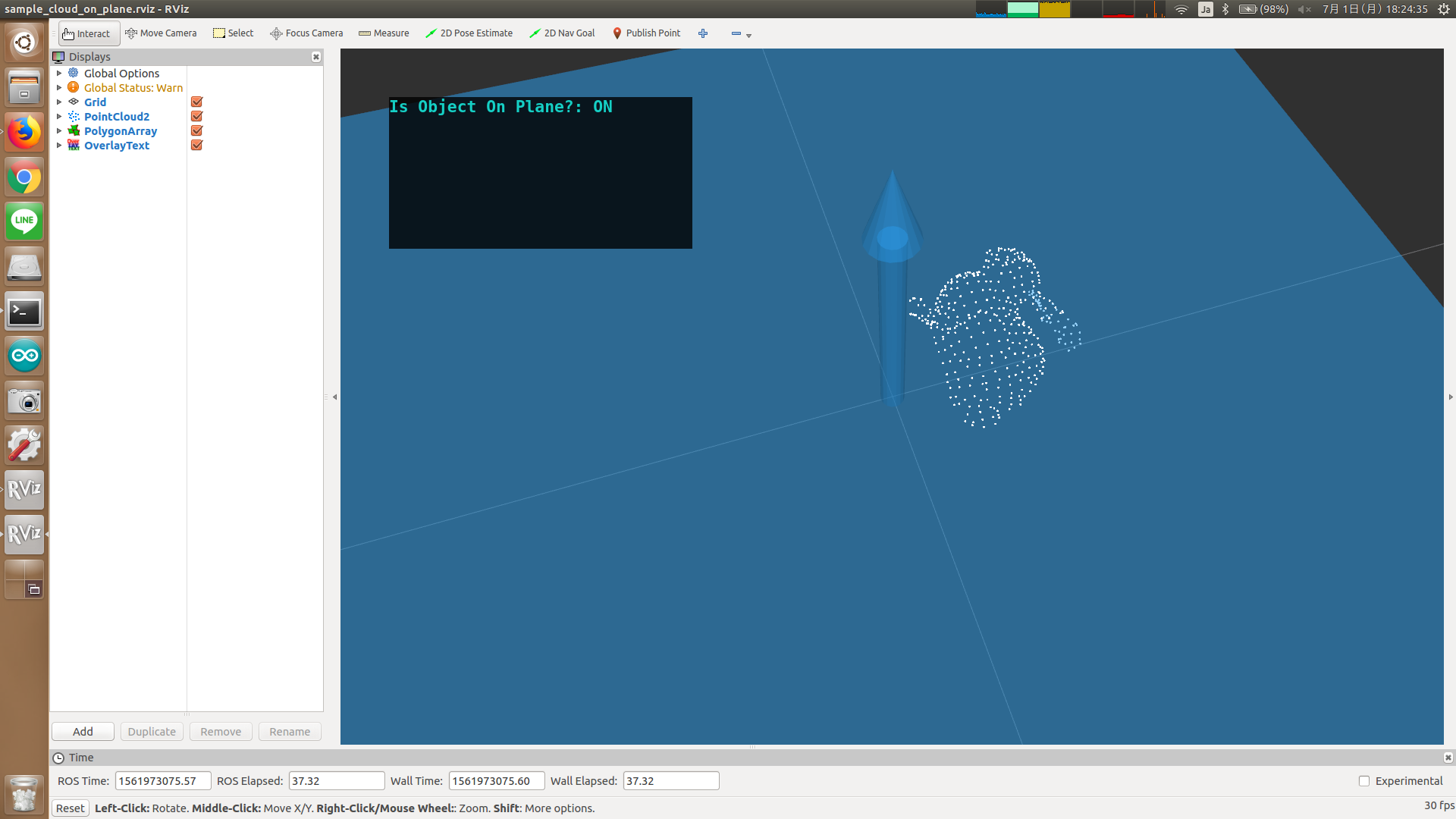
This text can be visualized with Rviz.
Parameters¶
None.
Sample¶
roslaunch jsk_pcl_ros_utils sample_cloud_on_plane.launch