ColorizeDistanceFromPlane¶
What Is This¶
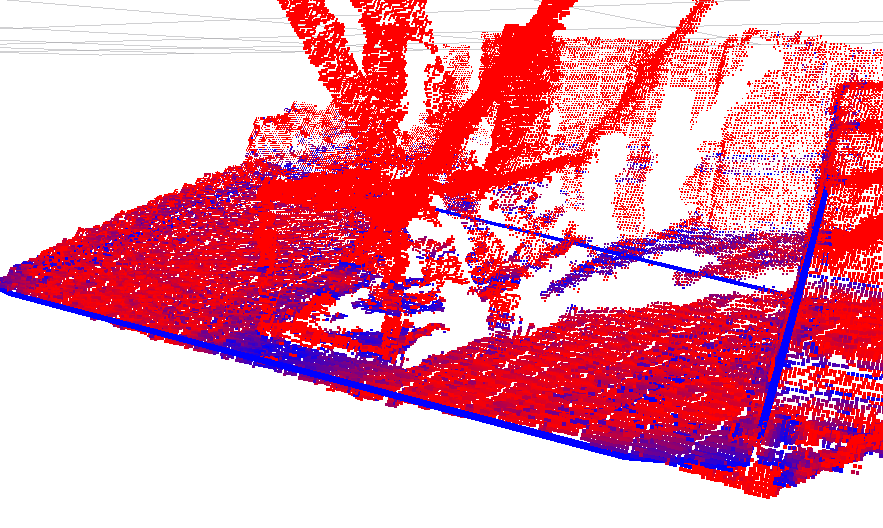
Colorize points based on distance from planes. This is usefull for calibration.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud.
~input_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Input model coefficients. This topic is used only for synchronizing.
~input_polygons(jsk_recognition_msgs/PolygonArray)Input plane.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Output colorized point cloud.
Parameters¶
~min_distance(Float, default:0.0)~max_distance(Float, default:0.1)Minimum/maximum distance of point cloud from planes.
Minimum corresponds to blue, while maximum corresponds to red.
These parameters can be changed by
dynamic_reconfigure.~only_projectable(Bool, default:False)Draw points only if then can be projected inside of convex.
This parameter can be changed by
dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros_utils sample_colorize_distance_from_plane.launch