CentroidPublisher¶
What Is This¶
This nodelet will subscribe the sensor_msgs::PointCloud2 or jsk_recognition_msgs/PolygonArray and calculate its centroid.
This also broadcasts coodinates of cloud or each polygons as tf whose parent is cloud headers frame_id and whose child is the new centroid frame_id.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):Input pointcloud.
~input/polygons(jsk_recognition_msgs/PolygonArray):Input polygon.
Publishing Topics¶
/tfPublish tf of the centroid of the input pointcloud.
~output/pose(geometry_msgs/PoseStamped)Centroid of the pointcloud as
geometry_msgs/PoseStamped.~output/point(geometry_msgs/PointStamped)Centroid of the pointcloud as
geometry_msgs/PointStamped.~output/pose_array(geometry_msgs/PoseArray)Centroid poses of each polygons.
Parameters¶
~frame(String, default: node name):A frame_id for centroid tf. For polygon array, suffix numbers are appended. (e.g.
frame00)~publish_tf(Boolean, default:False) Set this parameter toTruein order to publish tf frame. The invalid centroid is filtered and tf is not published in that case. Note that if this option isTrue, input topics are always subscribed.
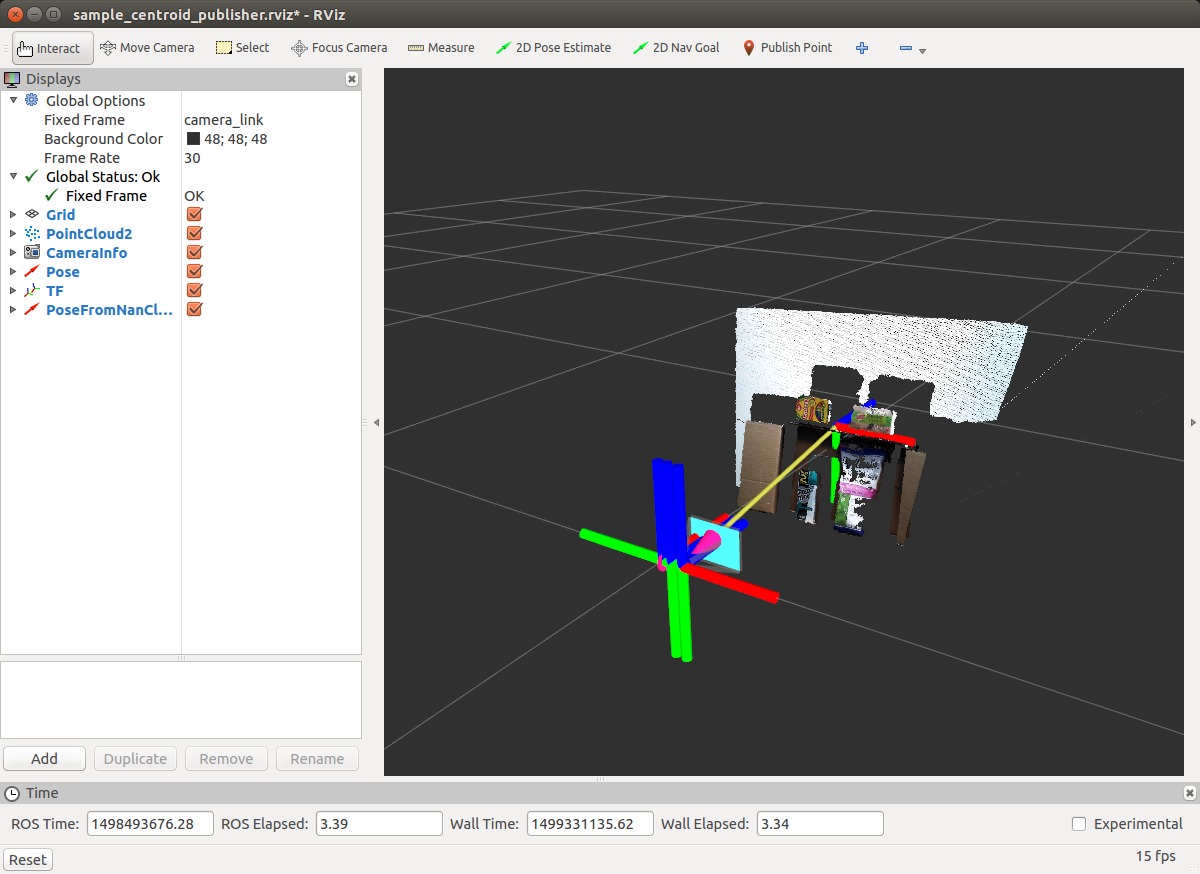
Sample¶
roslaunch jsk_pcl_ros_utils sample_centroid_publisher.launch