CloudOnPlane¶
Publishes true when a pointcloud is on a polygon.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)~input/polygon(jsk_recognition_msgs/PolygonArray)Input pointcloud and polygons.
Publishing Topics¶
~output(jsk_recognition_msgs/BoolStamped)True if distance between pointcloud and polygon is smaller than
~distance_thrfor~buf_sizeframes.
Parameters¶
~approximate_sync(Bool, default:False)Whether to allow approximate synchronization for input topics.
~distance_thr(Float, default:0.05)Distance threshold between pointcloud and polygon.
This parameter can be changed by
dynamic_reconfigure.~buf_size(Int, default:2)CloudOnPlane only returns true if all the recent
~buf_sizeresults is true.This parameter can be changed by
dynamic_reconfigure.
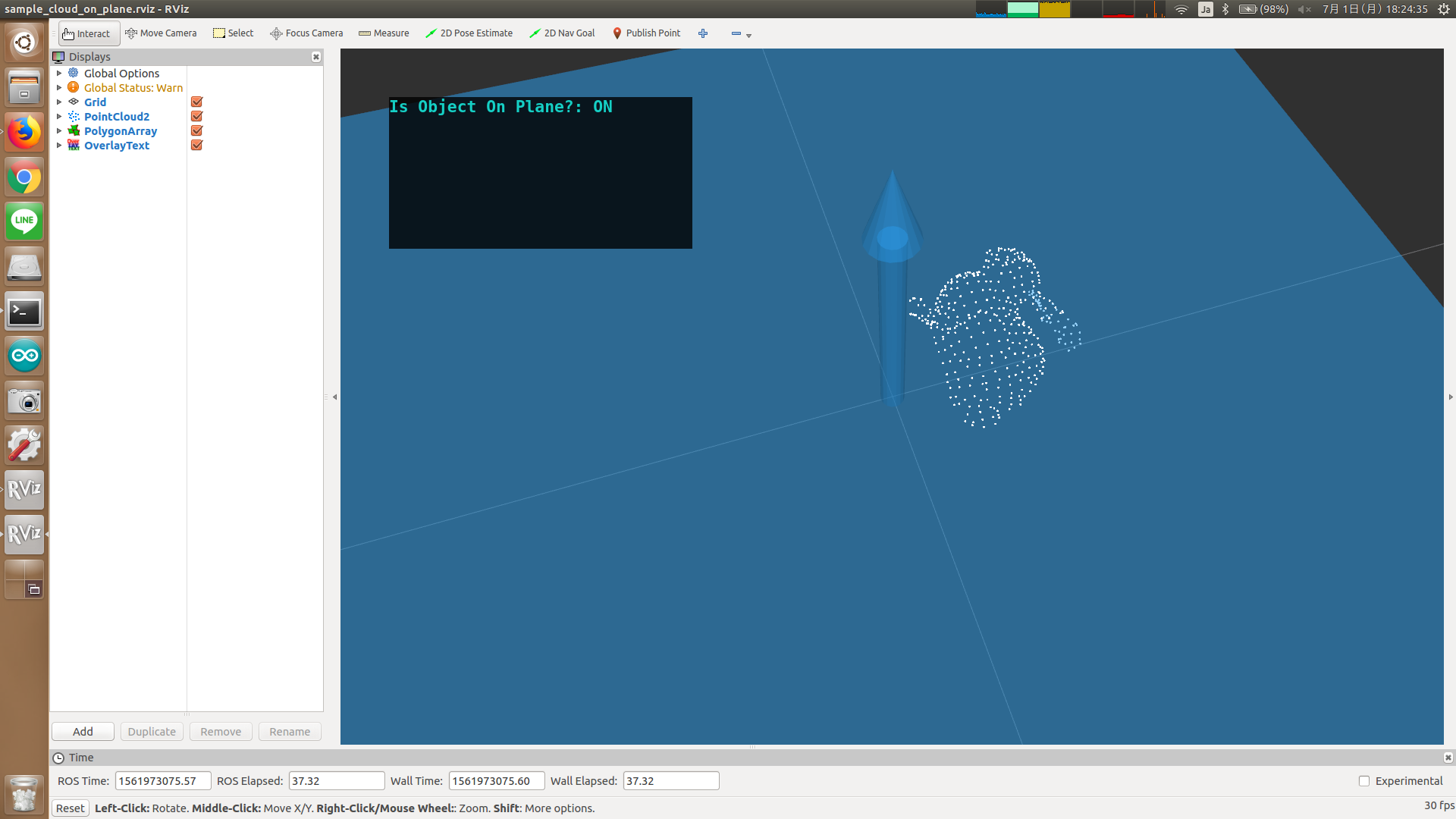
Sample¶
roslaunch jsk_pcl_ros_utils sample_cloud_on_plane.launch