StaticPolygonArrayPublisher¶
What Is This¶
Publish static polygons.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Point cloud topic whose header is used for timestamp of output topics.
~trigger(jsk_recognition_msgs/Int32Stamped)Trigger topic for publishing outputs.
Publishing Topic¶
~output_polygons(jsk_recognition_msgs/PolygonArray)Polygon array.
~output_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Normal array of polygons.
Parameter¶
~use_periodic(Bool, default:False)Enable timer publishing or not.
~use_message(Bool, default:False)Enable publishing when
~inputis subscribed.~use_trigger(Bool, default:False)Enable publishing when
~inputand~triggerare synchronously subscribed.
Note that at least one of these 3 parameters must be set to true.
~periodic_rate(Float, default:10.0)Publishing rate [Hz] used when
~use_periodicis true.~frame_ids(List of String, required)Frame ID of each polygon.
~polygon_array(List of List of List of Float, required)Polygon array.
Each polygon is composed of multiple (>=3) vertices, each of which is 3D point.
Example of
~polygon_arrayis below.polygon_array: - [[3, 0, 0], [0, 3, 0], [0, 1, 2], [1, 0, 2]] - [[-1, -1, 1], [4, 3, 0], [3, 4, 0]]
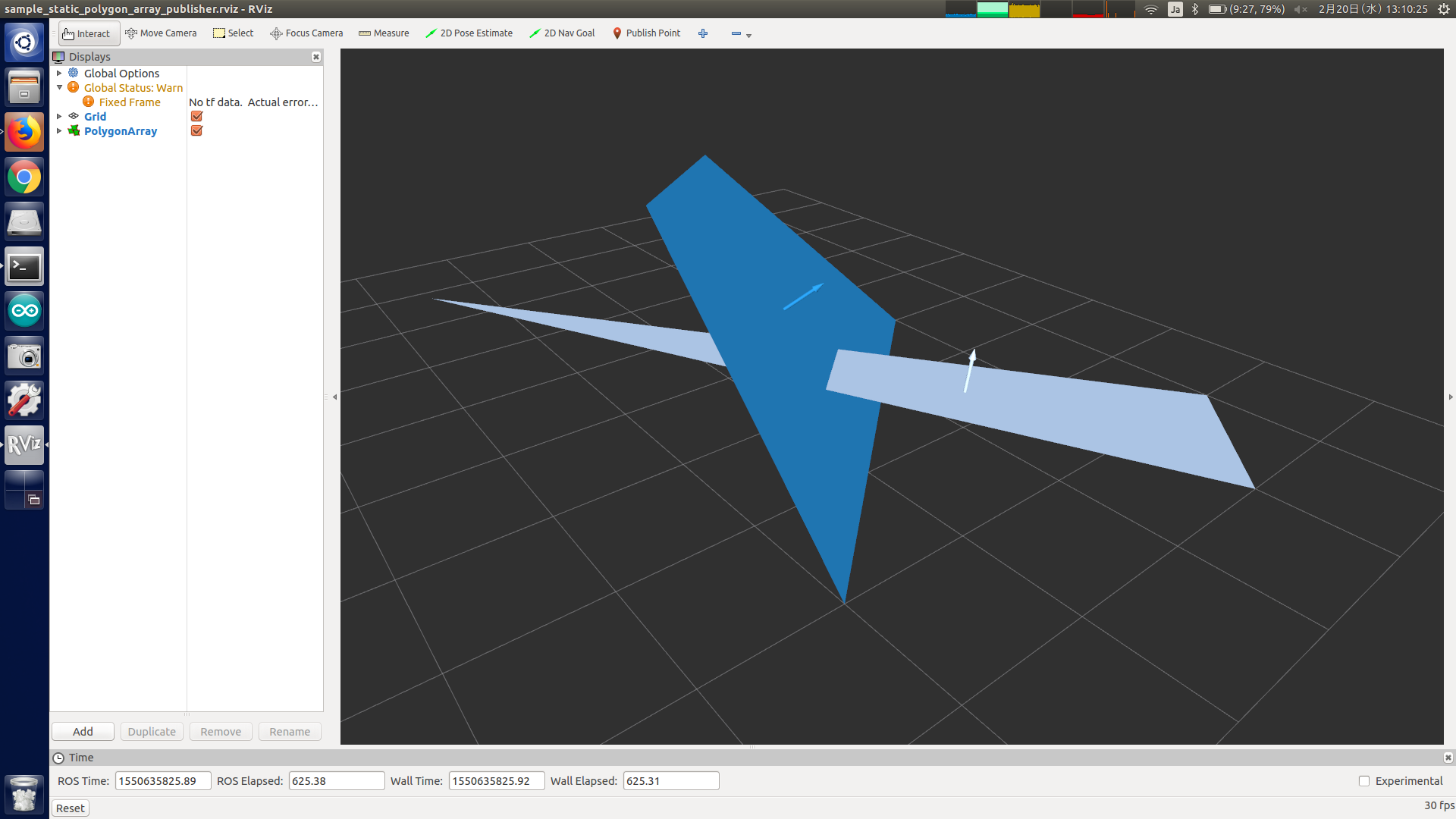
Sample¶
roslaunch jsk_pcl_ros_utils sample_static_polygon_array_publisher.launch