PointCloudRelativeFromPoseStamped¶
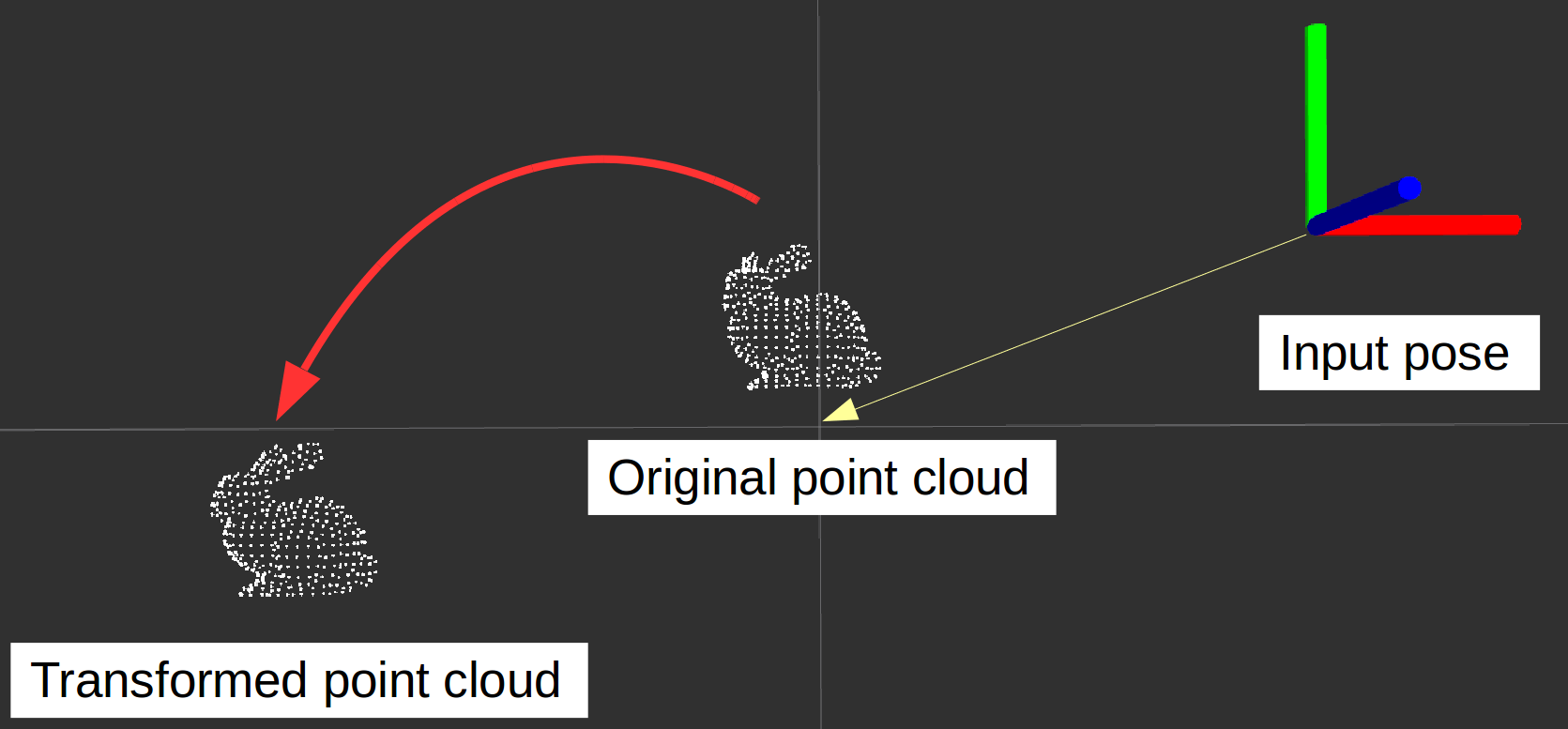
Transform pointcloud relative from the specified pose stamped. It is useful for preprocessing of registration to detect initial pose.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Original point cloud.
~input/pose(geometry_msgs/PoseStamped)Pose from which original point cloud will be transformed.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Transformed point cloud.
Parameters¶
~approximate_sync(Bool, default:False)Whether to allow approximate synchronization of input topics.
Sample¶
roslaunch jsk_pcl_ros_utils sample_pointcloud_relative_from_pose_stamped.launch