PolygonFlipper¶
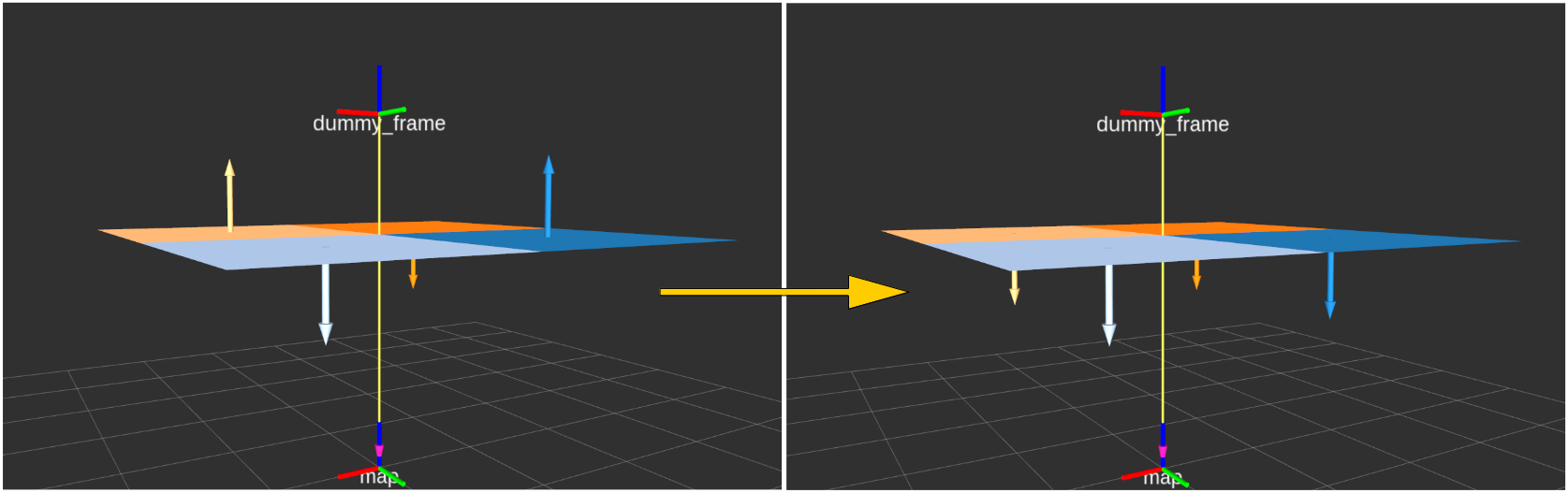
Flip jsk_recognition_msgs/PolygonArray to specified sensor_frame.
Subscribing Topic¶
~input/polygons(jsk_recognition_msgs/PolygonArray)~input/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)~input/indices(jsk_recognition_msgs/ClusterPointIndices)Input polygons. If
~use_indicesis disabled,~input/indicesis not used.
Publishing Topic¶
~output/polygons(jsk_recognition_msgs/PolygonArray)~output/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)~output/indices(jsk_recognition_msgs/ClusterPointIndices)Output flipped polygons which look at the origin of sensor_frame. If
~use_indicesis disabled,~output/indicesis not published.
Parameter¶
~sensor_frame(String, Required):The frame_id of sensor for polygons to look at.
~queue_size(Int, default:100):Queue size of subscribed messages for message synchronization.
~use_indices(Bool, default:true):Use indices if this parameter is enabled.
Sample¶
roslaunch jsk_pcl_ros_utils sample_polygon_flipper.launch