PCDReaderWithPose¶
Publish cloud with given pose
Parameters¶
~pcd_file(Strng, required)file name of pcd for publish
Subscribing Topocs¶
~input(geometry_msgs/PoseStamped)Pose for published pcd.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Point cloud whose position and orientation is filled from
~input.Also, frame ID will be the same as
~input.
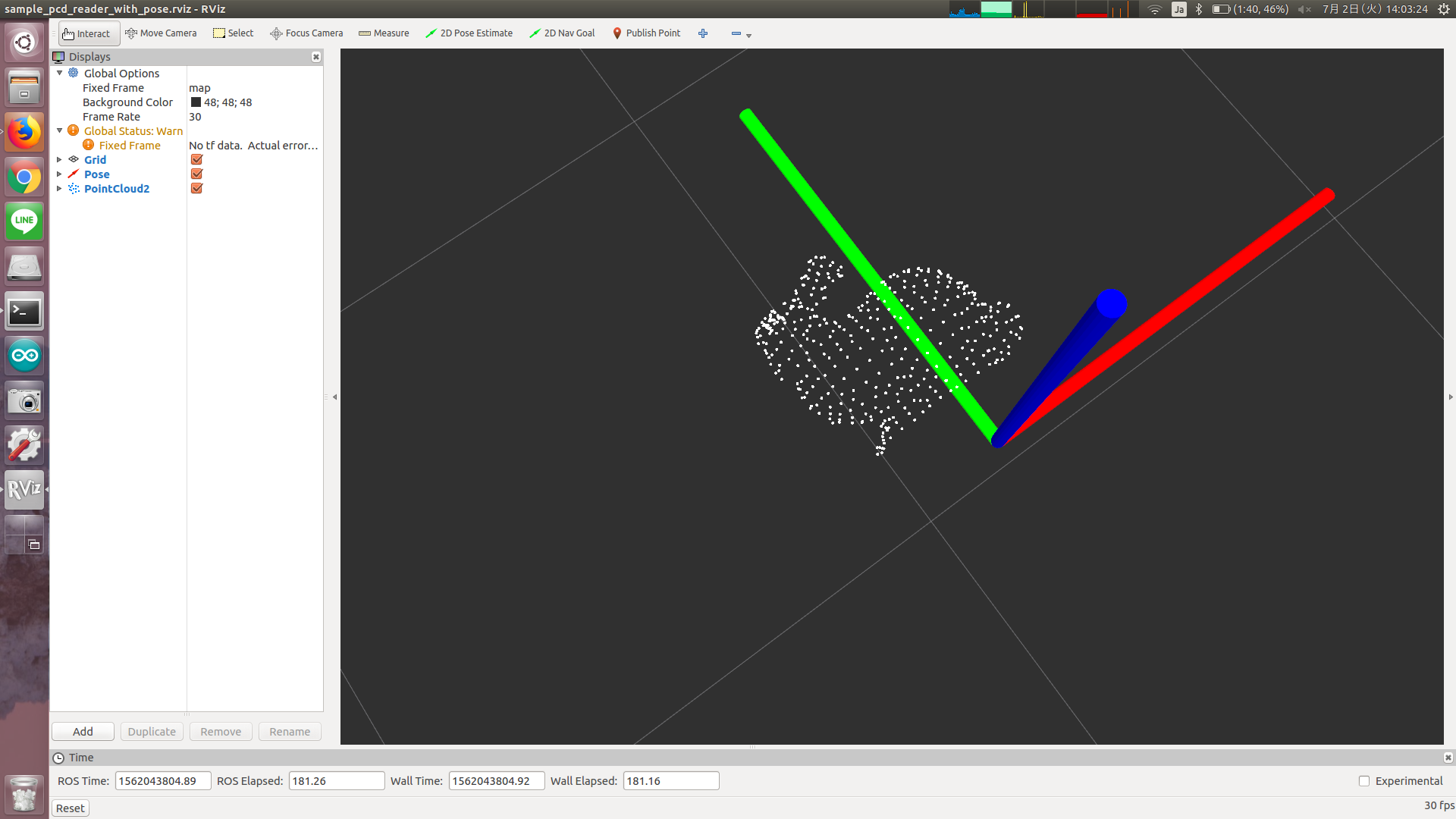
Sample¶
roslaunch jsk_pcl_ros_utils sample_pcd_reader_with_pose.launch