ColorizeHeight2DMapping¶
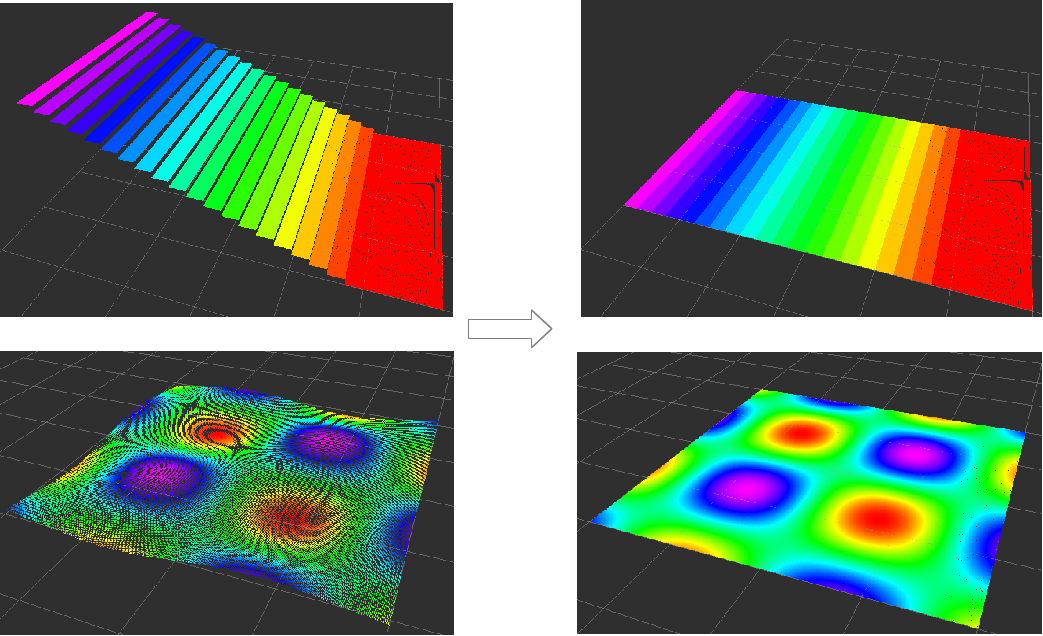
Utility nodelet to visualize heightmap as pointcloud. It just set all the z of points 0 and assign z to intensity.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input pointcloud.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Output pointcloud. z values of points are 0 and intensity of points has z value.
Sample¶
roslaunch jsk_pcl_ros_utils sample_colorize_height_2d_mapping.launch