PointcloudToSTL¶
What Is This¶
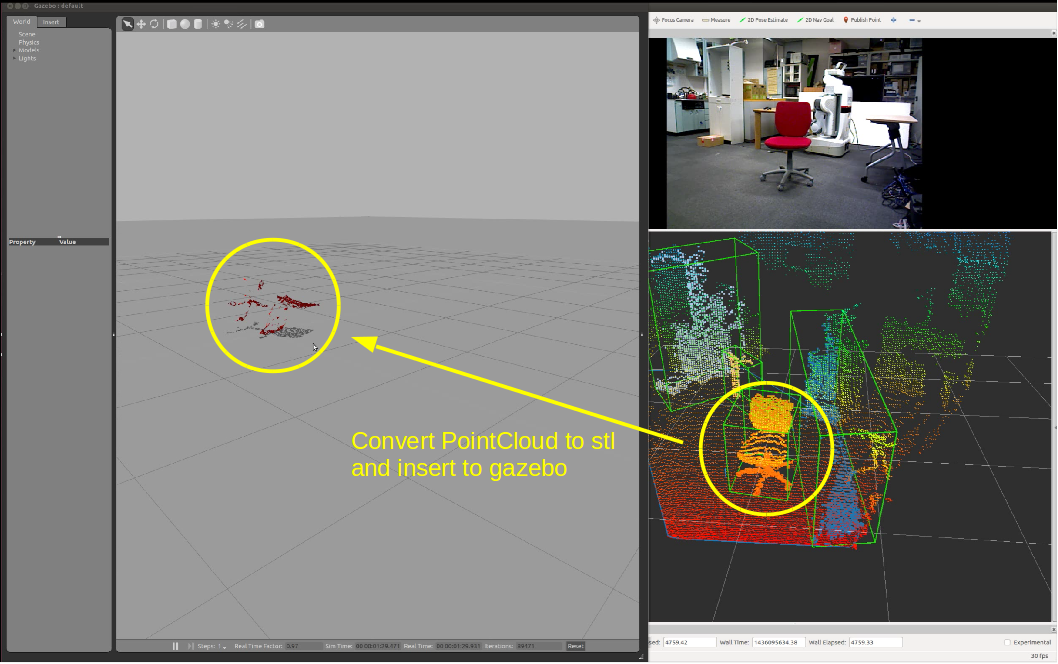
This nodelet converts organized pointcloud to stl mesh
using pcl::OrganizedFastMesh and generates a stl file.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Organized point cloud.
Publishing Topic¶
~pc_stl_mesh(visualization_msgs/Marker)Marker of output mesh.
Advertising Services¶
~create_stl(jsk_recognition_msgs/SetPointCloud2):Service API to create a stl file from pointcloud data.
Returns output filename.
Parameters¶
~filename(String, default:/tmp/$(ros::Time::now().toNSec())_pointcloud.stl)Path to STL mesh file.
~triangle_pixel_size(Float, default:1.0)Edge length (in pixels) used for constructing the fixed mesh.
~max_edge_length(Float, default:4.5)Maximum edge length.
~store_shadow_faces(Bool, default:True)Store shadowed faces or not.
~search_radius(Float, default:0.05)~mu(Float, default:3.5)~maximum_nearest_neighbors(Int, default:100)~maximum_surface_angle(Float, default:pi / 4)~minimum_angle(Float, default:pi / 18)~maximum_angle(Float, default:pi * 2 / 3)~normal_consistency(Bool, default:False)These parametes are not used now.
Sample¶
roslaunch jsk_pcl_ros_utils sample_pointcloud_to_stl.launch