objectdetection_transform_echo¶
What is this?¶
Subscrive posedetection_msgs/ObjectDetection messages and get transform between them.
See also: objectdetection_tf_publisher.py
Subscribing Topics¶
detection1(posedetection_msgs/ObjectDetection)detection2(posedetection_msgs/ObjectDetection)Input object pose. This node will calculate pose from
detection2todetection1atframe_idframe.
Publishing Topics¶
pose(geometry_msgs/PoseStamped)Transform between input poses.
Parameters¶
frame_id(String, default:"")Frame ID of
posetopic.
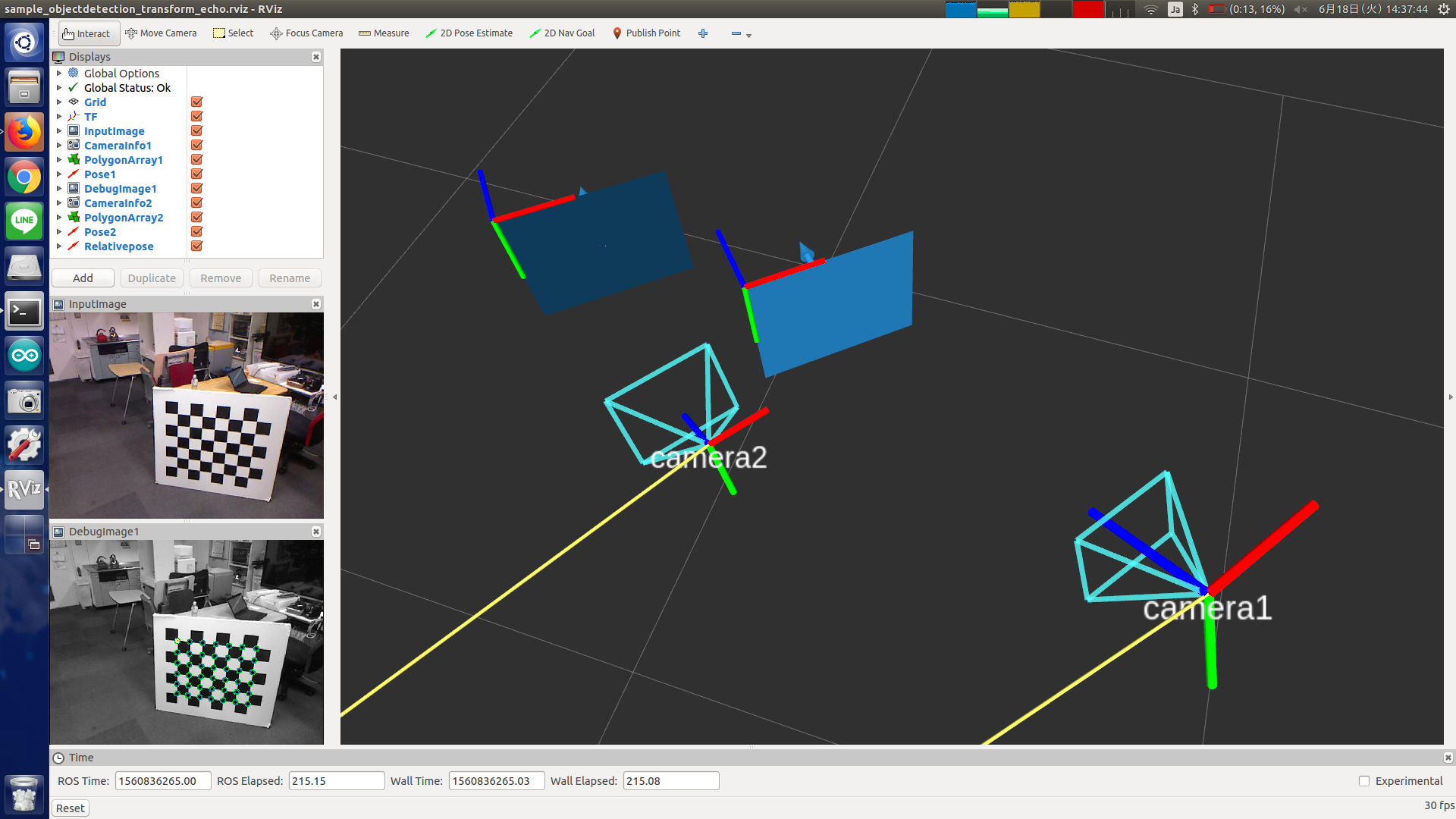
Sample¶
roslaunch checkerboard_detector sample_objectdetection_transform_echo.launch