objectdetection_tf_publisher¶
What is this?¶
Subscrive posedetection_msgs/ObjectDetection message and broadcast TF.
Subscribing Topics¶
ObjectDetection(posedetection_msgs/ObjectDetection)Input object pose.
Publishing Topics¶
/tf(tf2_msgs/TFMessage)Object transform.
Parameters¶
~use_simple_tf(Bool, default:False)Whether to use
tf.TransformBroadcasteror not. If false, this node will use dynamic_tf_publisher
Parameters below will be enabled only when ~use_simple_tf is False.
~checker_board_params/header_frame(String, required)Parent frame ID.
~frame_id(String, default:object)Child frame ID.
~checker_board_params/position_x(Float, default:0.0)~checker_board_params/position_y(Float, default:0.0)~checker_board_params/position_z(Float, default:0.0)~checker_board_params/orientation_x(Float, default:0.0)~checker_board_params/orientation_y(Float, default:0.0)~checker_board_params/orientation_z(Float, default:0.0)~checker_board_params/orientation_w(Float, default:0.0)Object pose.
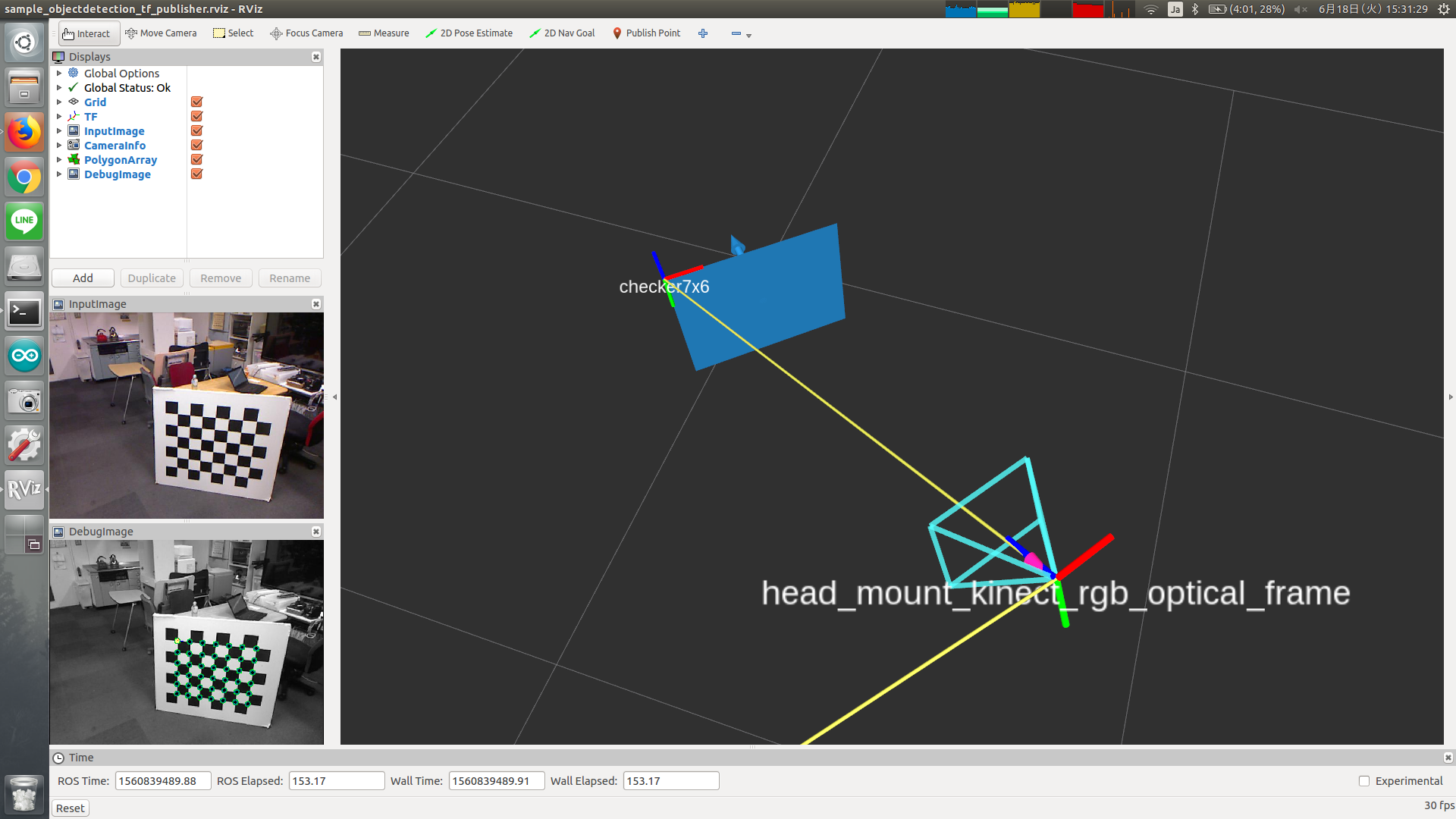
Sample¶
roslaunch checkerboard_detector sample_objectdetection_tf_publisher.launch