checkerboard_detector¶
checkerboard_detector is an executable to detect checker board.
You can find marker pattern in jsk-ros-pkg/calibboard_sheet.
Subscribing Topics¶
image(sensor_msgs/Image)camera_info(sensor_msgs/CameraInfo)Input image and camera info. Intrinsic camera parameter is acquired from
camera_info.Image(sensor_msgs/Image)CameraInfo(sensor_msgs/CameraInfo)These topics are deprecated.
Publishing Topics¶
ObjectDetection(posedetection_msgs/ObjectDetection)objectdetection_pose(geometry_msgs/PoseStamped)Pose of checkerboard in
posedetection_msgs/ObjectDetectionandgeometry_msgs/PoseStamped.corner_point(geometry_msgs/PointStamped)Corner points.
polygons(jsk_recognition_msgs/PolygonArray)Publish checker board as
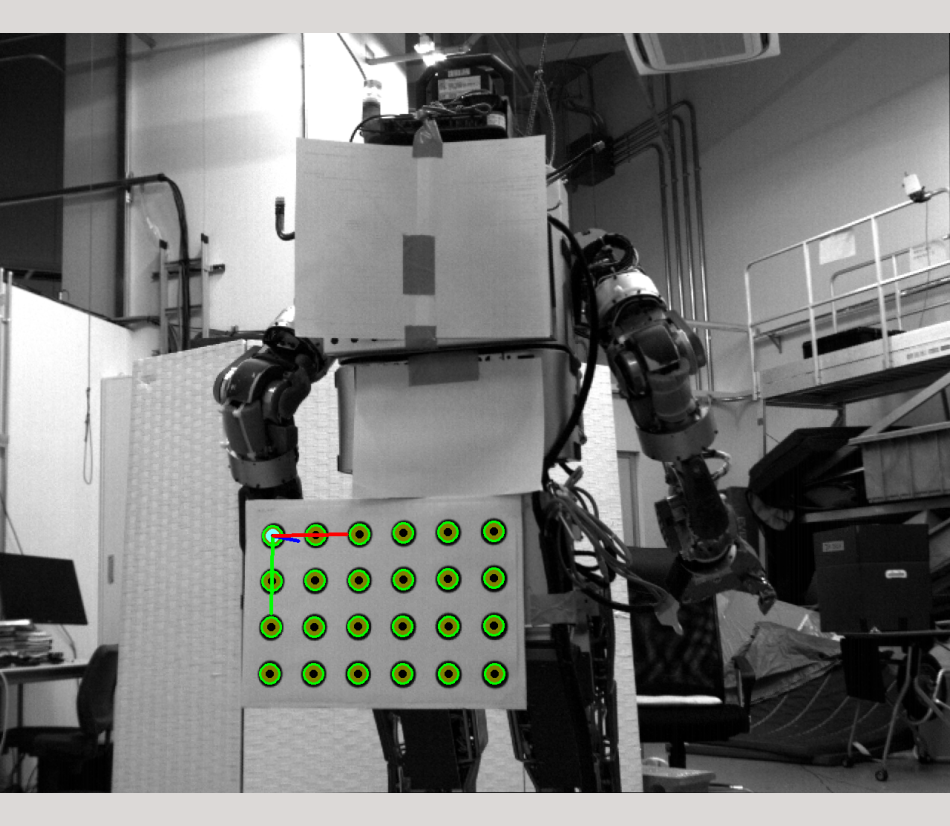
jsk_recognition_msgs/PolygonArray. It is useful to visualize in rviz.debug_image(sensor_msgs/Image)Debug image showing detected checker board.
Parameters¶
display(Int, default:0)Set
1to enable debug view (notimage_viewbut OpenCV window). Note thatdebug_imageis published even when this parameter is set to0.board_type(String, default:chess)Type of marker.
chess,circle,circles,acircleandacirclesare supported.circleandcirclesare the same, and alsoacircleandacirclesare.rect%d_size_x(Float, required)rect%d_size_y(Float, required)Size of checkerboard in meters, where
%dmeans index of checker board starting from0.grid%d_size_x(Int, required)grid%d_size_y(Int, required)The number of grids along x and y axis.
type%d(String, default:checker%dx%d)Name of checker board written to
objects/typefield inObjectDetectiontopic.maxboard(Int, default:-1)Maximum number of checker board.
-1means infinity, so this node wil detect as much as possible.use_P(Bool, default:false)By default, use camera matrix (K) and unrectified image (image_raw). If you use rectified image (image_rect),
use_Pshould betrue.invert_color(Bool, default:false)Invert white and black before searching cross points or circles.
message_throttle(Int, default:1)Finding checker boards every
message_throttleimagesframe_id(String, default:"")Frame ID written to
ObjectDetectiontopic header. If empty string is specified, frame_id ofimagetopic will be used.queue_size(Int, default:1)publish_queue_size(Int, default:1)Size of queue of subscriber is
queue_size, publisher ispublish_queue_size.axis_size(Float, default:0.05)circle_size(Int, default:6)For setting displayed marker size. Set
circle_sizein [pixel]. Setaxis_sizein [m].verbose(Int, default:1)Output information about input image, number of detected checker board and elapsed time as
ROS_INFOif this parameter is greater than0.
Sample¶
roslaunch checkerboard_detector sample_checkerboard_detector.launch
Trouble Shooting¶
Q. Estimated checker board pose is not correct
A. First check debug image and all the detected corner points correctly superimposed on camera view.
If the detected corner points is not correct, you need to modify checker board grid size (
grid_sizeparameters).If the detected corner points is correct, confirm checker board size (
rect_sizeparmaeters) and intrinsic camera paramter is calibrated well.
Q. How many number of grids better?
A. I strongly recomment to choose
oddxevenorevenxodd. Because if you chooseoddxoddorevenxeven, detector will have two potential poses.