checkerboard_calibration¶
What is this?¶
A ROS node for calibrating camera intrinsic parameter by using checker board. You can find marker pattern in jsk-ros-pkg/calibboard_sheet. This node only supports chess board pattern.
You can click mouse middle button at either image window and then get calibration result as ROS_INFO.
Also, you can clear current calibration data by clicking mouse right button at either window.
Please consider using camera_calibration package.
Subscribing Topics¶
image(sensor_msgs/Image)Input image for calibration. The image assumed to be
image_raw, which means it is not rectified.Image(sensor_msgs/Image)Deprecated.
Publishing Topics¶
None.
Parameters¶
display(Int, default:1)Set
1to show viewer (notimage_viewbut OpenCV window).grid_size_x(Int, required)grid_size_y(Int, required)The number of grids along x and y axis.
rect_size_x(Float, required)rect_size_y(Float, required)Size of checkerboard in meters.
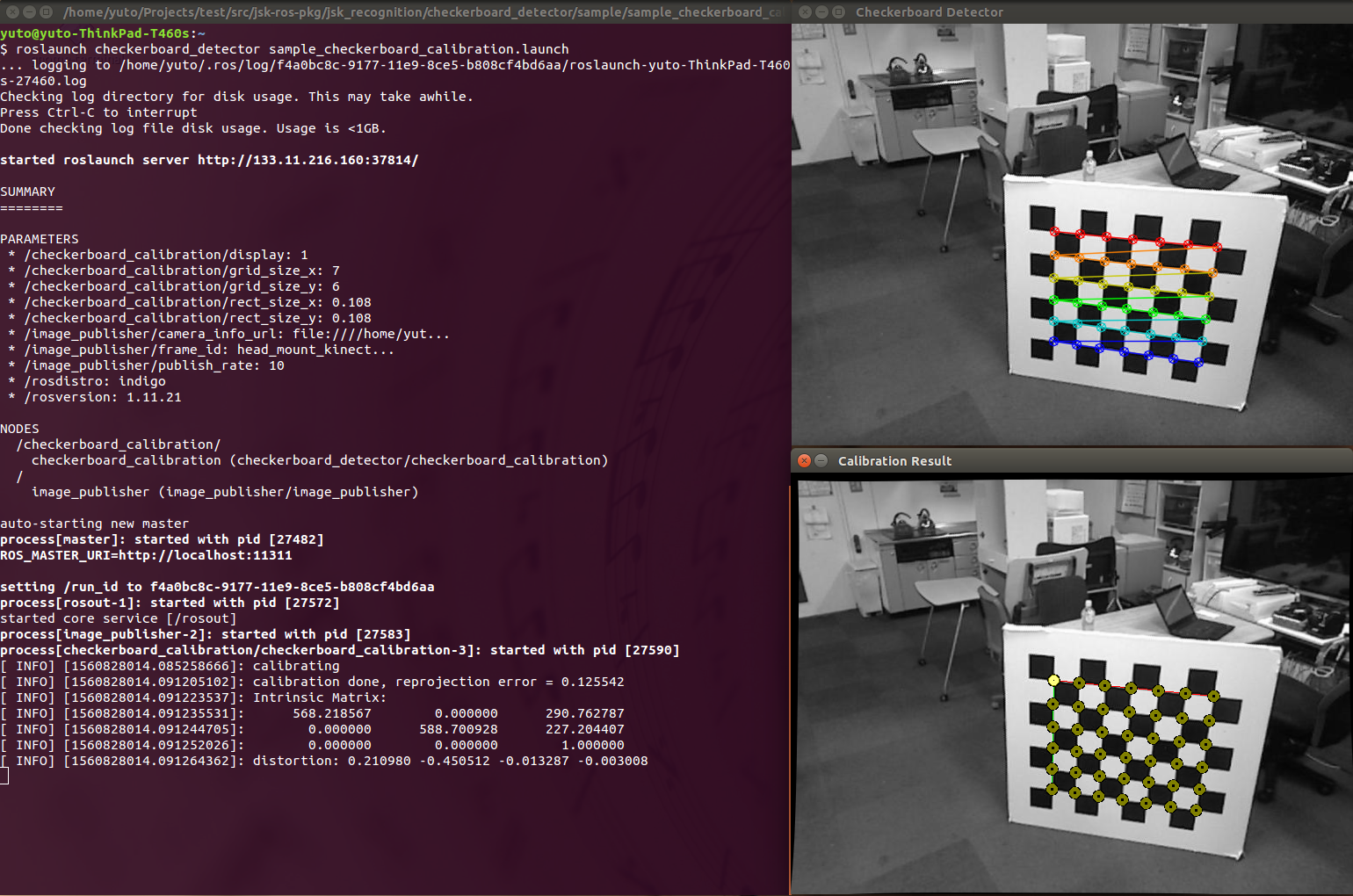
Sample¶
roslaunch checkerboard_detector sample_checkerboard_calibration.launch