object_array_publisher.py¶
What is this?¶
Get mesh as rosparam and publish them as jsk_recognition_msgs/ObjectArray.
Publishing Topic¶
~output(jsk_recognition_msgs/ObjectArray)Output meshes.
Parameters¶
~objects(List, required)List of mesh.
~latch(Bool, default:False)If true, oneshot publish is enabled and timestamp is fixed.
Example parameters are below.
<rosparam>
latch: true
objects:
- id: 1
name: avery_binder
image_resources:
- package://jsk_arc2017_common/data/objects/avery_binder/top.jpg
mesh_resource: package://jsk_arc2017_common/data/objects/avery_binder/mesh/mesh.obj
- id: 35
name: tennis_ball_container
class_id: 2
class_name: cylinder
image_resources:
- package://jsk_arc2017_common/data/objects/tennis_ball_container/top.jpg
mesh_resource: package://jsk_arc2017_common/data/objects/tennis_ball_container/mesh/mesh.obj
weight: 0.217
dimensions:
x: 0.077
y: 0.218
z: 0.077
</rosparam>
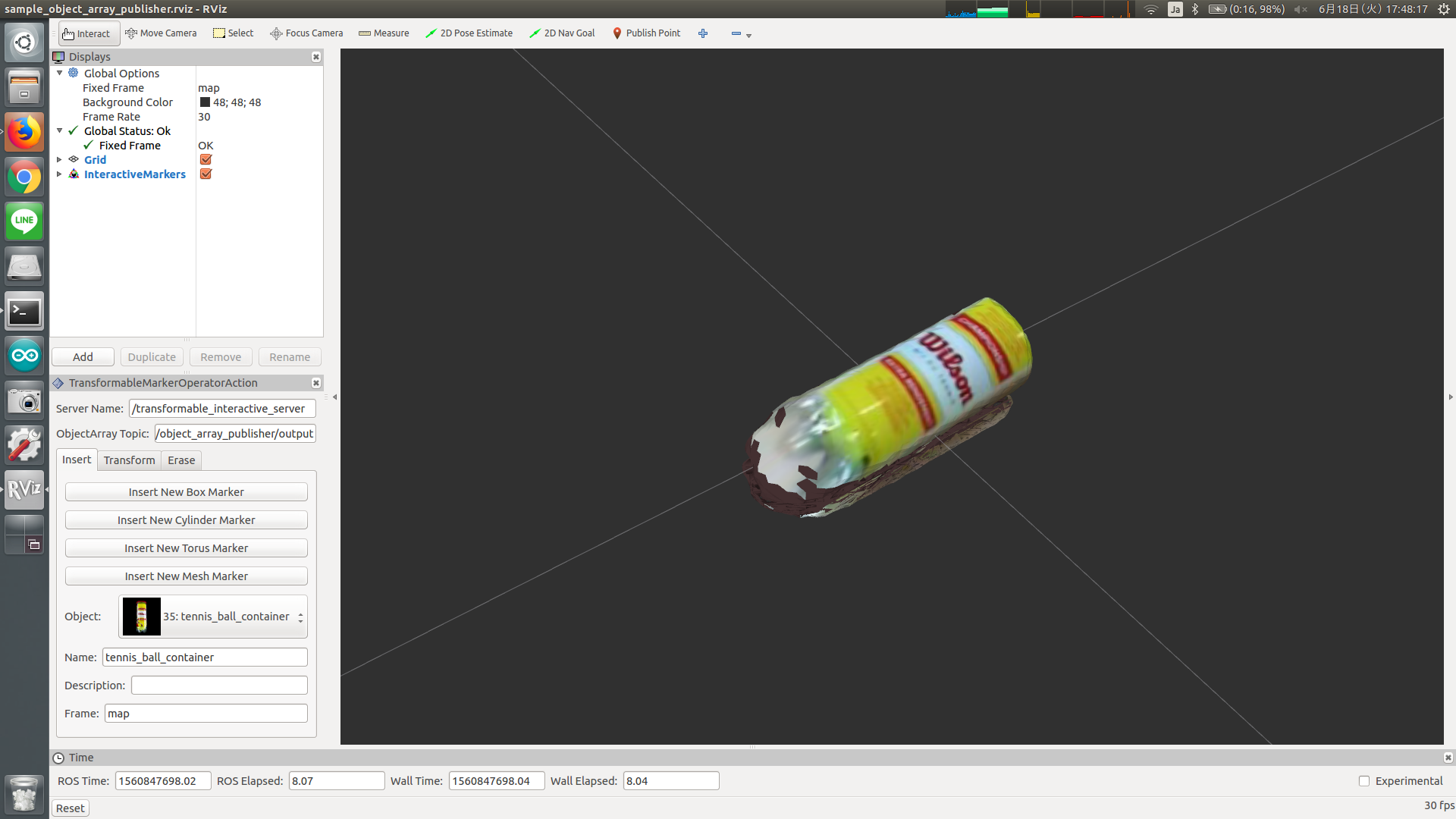
Sample¶
roslaunch jsk_recognition_msgs sample_object_array_publisher.launch JSK_INTERACTIVE_MARKER_INSTALLED:=true # default: false