ConnectionBasedTransport (Python)¶
Description¶
This class is a base-class which can start subscribing topics if published topics are subscribed by the other node. This is abstruct class.
Users inherit this class and define publisher by calling the self.advertise function.
The return value of self.advertise is the Publisher class. User should execute publish in callback function.
For Expert¶
When publish is executed, it is judged that this node is running normally, and published diagnostics becomes OK level.
However, if the publisher is subscribed but the publish function is not called, the node is not working properly and diagnostics will be at the ERROR level.
Some users may executepublish at any time (eg rospy.Timer).
In that case, by executing the self.poke function in the callback function, the state of diagnostics will be OK level without executing publish.
Parameter¶
~always_subscribe(Bool, default:false):Subscribes topics even if there is no subscribers of advertised topics if
true.~enable_vital_check(Bool, default:true):If this value is
true,/diagnosticswill be published and the status of whether the topic has been published will be output from this node.~vital_rate(Double, default:1.0):Rate to determine if the nodelet is in health. If the rate that the callback functions is below this parameter, error messages are displayed on diagnostics. This value is valid only if
~enable_vital_checkistrue./diagnostic_nodelet/use_warnor~use_warn(Bool, default:False):If this parameter is enabled, diagnostic messages on failure is displayed on
WARNlevel instead ofERRORlevel./diagnostic_nodelet/use_warnaffects every nodelets that inherits this class, but it still can be overriden for each nodelet by setting~use_warnparameter.
Publishing Topic¶
/diagnostics(diagnostic_msgs.DiagnosticArray):Diagnostic messages. Required if
~enable_vital_check:=true
How does it behaves?¶
# terminal 1:
$ roslaunch jsk_topic_tools test_connection_based_transport.test
# terminal 2:
$ rostopic echo /simple_image_transport/output
# terminal 3:
$ rostopic info /simple_image_transport/output
Type: sensor_msgs/Image
Publishers:
* /simple_image_transport (http://133.11.216.160:42481/)
Subscribers:
* /rostopic_137980_1496651422064 (http://133.11.216.160:38414/)
# terminal 2:
$ ^C # cancel
# terminal 3:
$ rostopic info /simple_image_transport/output
Type: sensor_msgs/Image
Publishers:
* /simple_image_transport (http://133.11.216.160:42481/)
Subscribers: None
How to use it?¶
See jsk_topic_tool/sample/simple_image_transport.py to how to use it.
import rospy
from sensor_msgs.msg import Image
from jsk_topic_tools import ConnectionBasedTransport
class SimpleImageTransport(ConnectionBasedTransport):
def __init__(self):
super(SimpleImageTransport, self).__init__()
self._pub = self.advertise('~output', Image, queue_size=1)
def subscribe(self):
self.sub_img = rospy.Subscriber('~input', Image, self._process)
def unsubscribe(self):
self.sub_img.unregister()
def _process(self, img_msg):
self._pub.publish(img_msg)
if __name__ == '__main__':
rospy.init_node('sample_image_transport')
img_trans = SimpleImageTransport()
rospy.spin()
Checking the node status by diagnostics¶
You can check diagnostics by setting ~enable_vital_check to true.
# terminal 1:
$ roslaunch jsk_topic_tools sample_connection_based_transport.launch
# terminal 2:
$ rostopic list
/diagnostics
/diagnostics_agg
/diagnostics_toplevel_state
/input
/input_dummy
/input_image
/mux/selected
/rosout
/rosout_agg
/simple_image_transport/output
# terminal 3:
$ rosrun rqt_robot_monitor rqt_robot_monitor
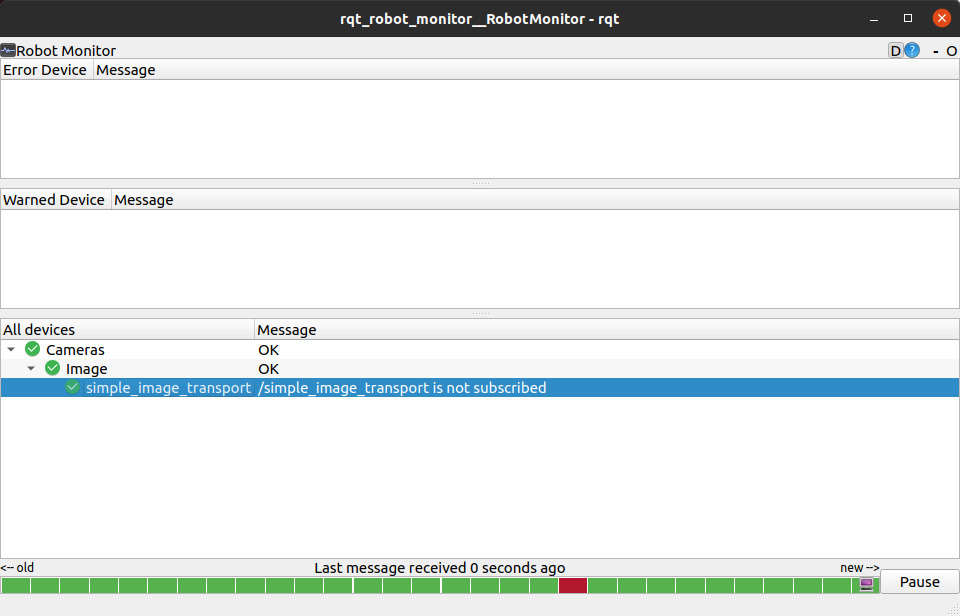
There is no one to subscribe to /simple_image_transport/output, so diagnostics is OK.
# terminal 4:
rostopic echo /simple_image_transport/output
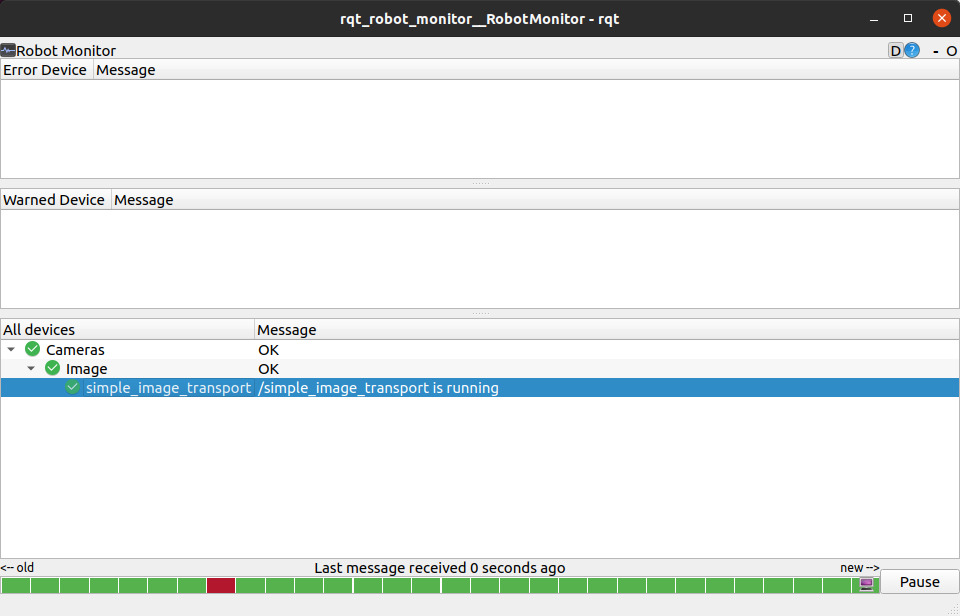
If you subscribe to /simple_image_transport/output,
it will change to the diagnostics message /simple_image_transport is running.
# terminal 5:
rosservice call /mux/select input_dummy
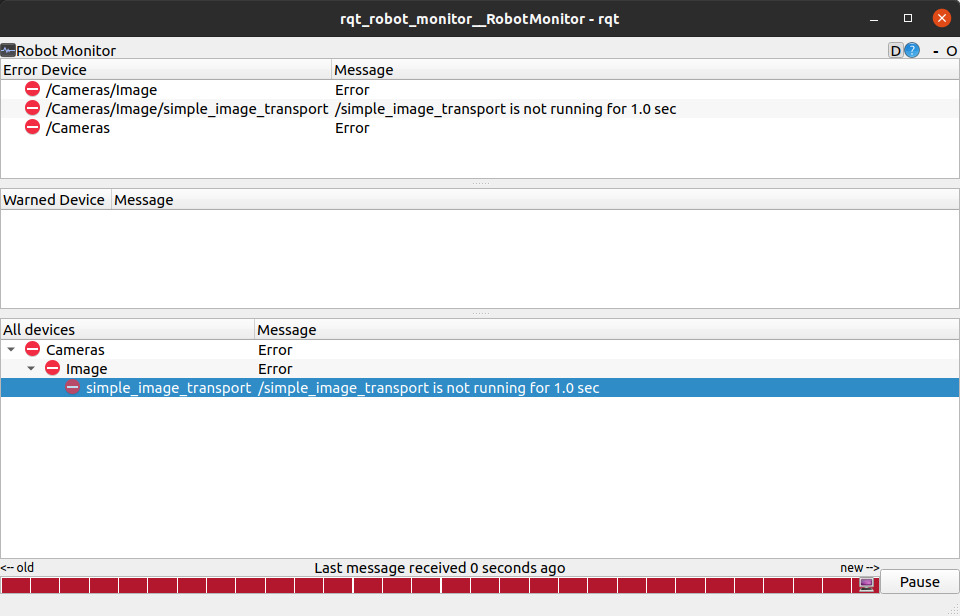
When changing input for simple_image_transport by mux,
the error message will change to /simple_image_transport is not running.
You can check if the node is running correctly like these.