transform_wrench.py¶
What is this?¶
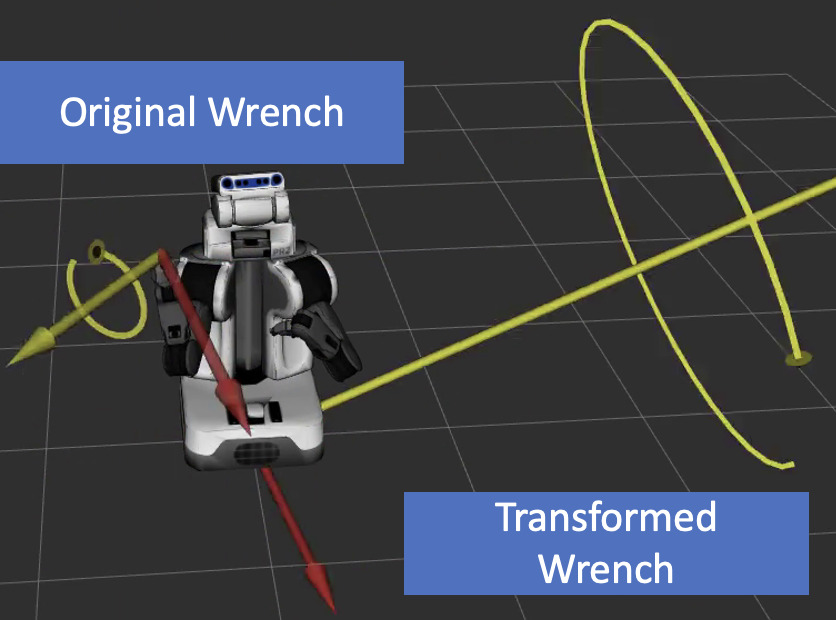
Convert WrenchStamped topic with respect to ~target_frame_id.
Subscribing Topics¶
~input(geometry_msgs/WrenchStamped)Input wrench stamped message.
Publishing Topics¶
~outputTransformed
WrenchStampedtopic with respect to~target_frame_id.
Parameters¶
~target_frame_id(String, required)Reference frame of wrench.
~duration_timeout(Float, default:0.05)Duration of timeout for lookup transform.
Example¶
roslaunch jsk_topic_tools sample_transform_wrench.launch launch_robot_model:=true gui:=true