Gripper-v6 Setup¶
Adjust gravity compensation¶
Gripper-v6 is heavy (1.18kg), so we should adjust gravity compensation of Baxter.
For now (2017/6/17), roslaunch jsk_arc2017_baxter baxter.launch does it by:
$ rostopic pub -1 /robot/end_effector/right_gripper/command baxter_core_msgs/EndEffectorCommand '{ id : 131073, command : "configure", args : "{ \"urdf\":{ \"name\": \"right_gripper_mass\", \"link\": [ { \"name\": \"right_gripper_mass\", \"inertial\": { \"mass\": { \"value\": 1.18 }, \"origin\": { \"xyz\": [0.0, 0.0, 0.15] } } } ] }}"}'
If you want to change gripper, you should restore to the original setting by:
$ rostopic pub -1 /robot/end_effector/right_gripper/command baxter_core_msgs/EndEffectorCommand '{ id : 131073, command : "configure", args : "{ \"urdf\":{ \"name\": \"right_gripper_mass\", \"link\": [ { \"name\": \"right_gripper_mass\", \"inertial\": { \"mass\": { \"value\": 0 }, \"origin\": { \"xyz\": [0.0, 0.0, 0.0] } } } ] }}"}'
More information about gripper customization of Baxter is on official page
Distinguish left DXHUB from right one¶
Each left and right gripper has its own DXHUB for communication with motors.
To distinguish two DXHUBs and create correct symbolic links (/dev/r_dxhub and /dev/l_dxhub), you have to change the configuration of left DXHUB from default.
Because the configuration is inside EEPROM of FTDI chip on DXHUB, you have to write a new configuration to that EEPROM.
Method on Windows¶
You should use FT_PROG to program EEPROM. Please install it and take the following steps to change the configuration.
- Connect DXHUB to PC with a USB cable. Don’t connect other USB devices. Power supply to DXHUB is not needed
- Wait until device driver installation is finished
- Launch FT_PROG
- Click the loupe icon to scan devices
- Click the plus icon of “USB String Descriptors”
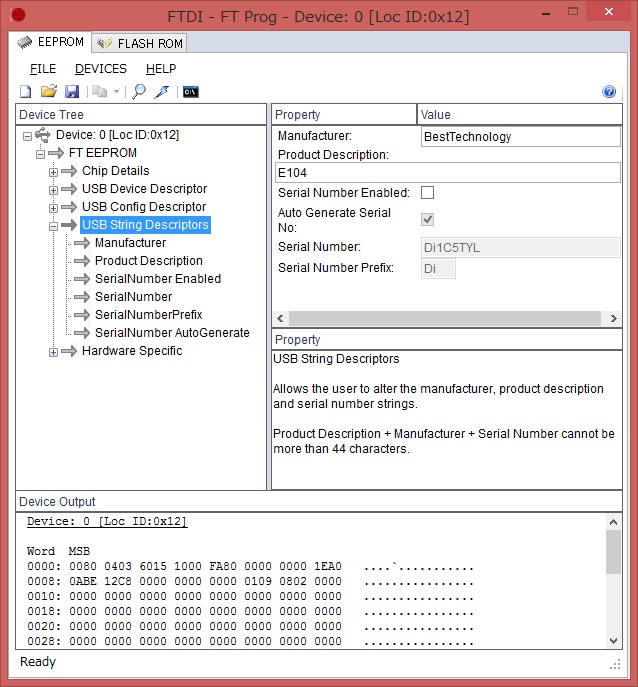
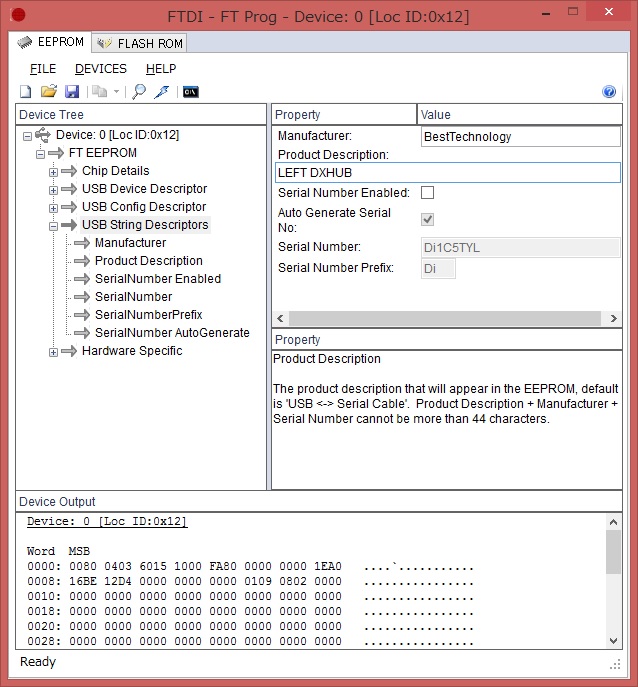
- Change “Product description” value to the value of
ATTRS{product}in the udev rule
- Click the lightning icon
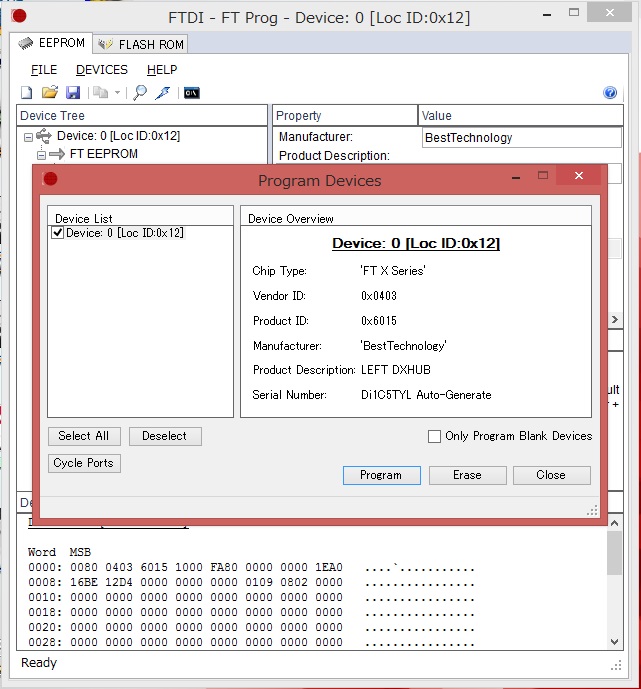
- Click “Program” to write the modified configuration to EEPROM