State Machine¶
Task states are controlled by smach.
You can check state machines by smach_viewer.
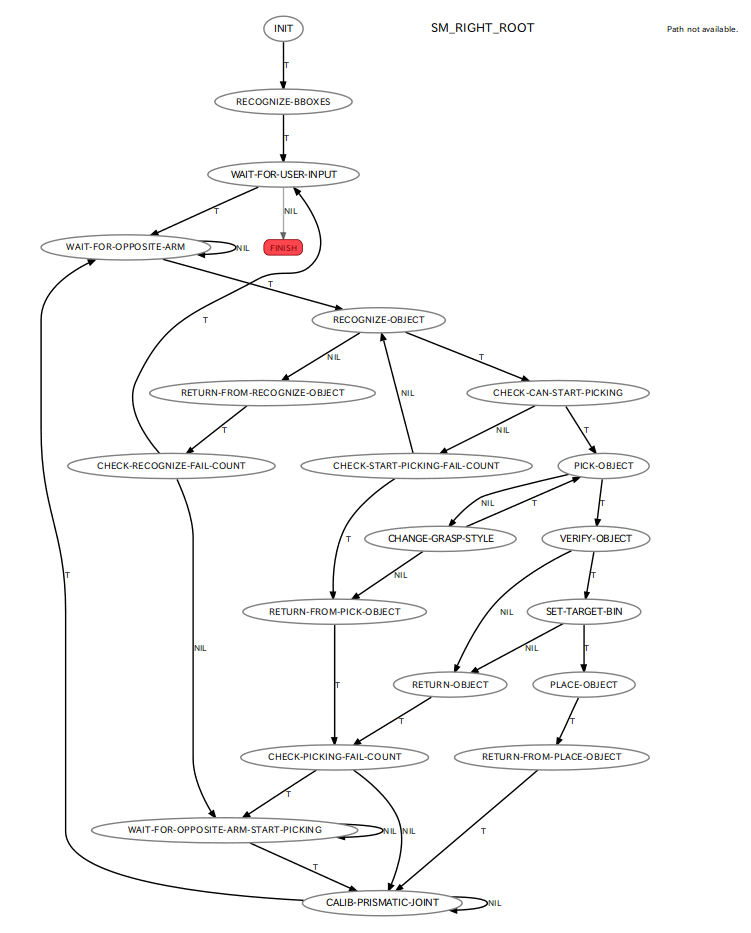
Pick Task¶
# Run pick task with smach_viewer
baxter@sheeta $ roslaunch jsk_arc2017_baxter pick.launch json_dir:=$(rospack find jsk_arc2017_common)/data/json/sample_pick_task smach_viewer:=true
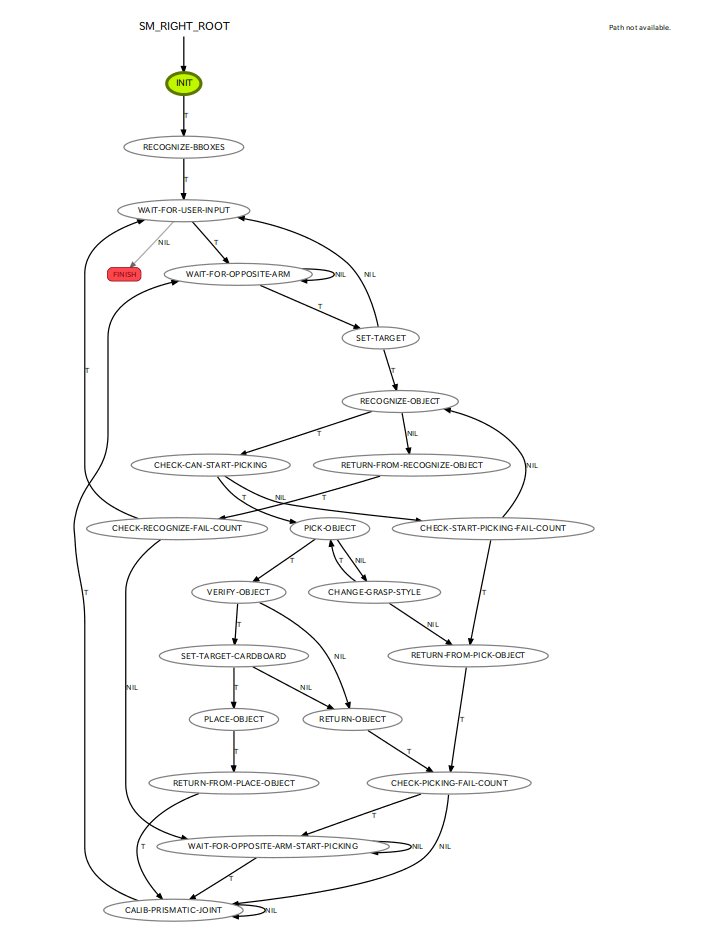
Stow Task¶
# Run stow task with smach_viewer
baxter@sheeta $ roslaunch jsk_arc2017_baxter stow.launch json_dir:=$(rospack find jsk_arc2017_common)/data/json/sample_stow_task smach_viewer:=true